

Humanoid prosthetic hand
A prosthetic hand and finger technology, applied in artificial arms and other directions, can solve the problems of large volume, large weight, high energy consumption, and poor humanoid appearance in the form of motion, and achieve the effect of light weight and small volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
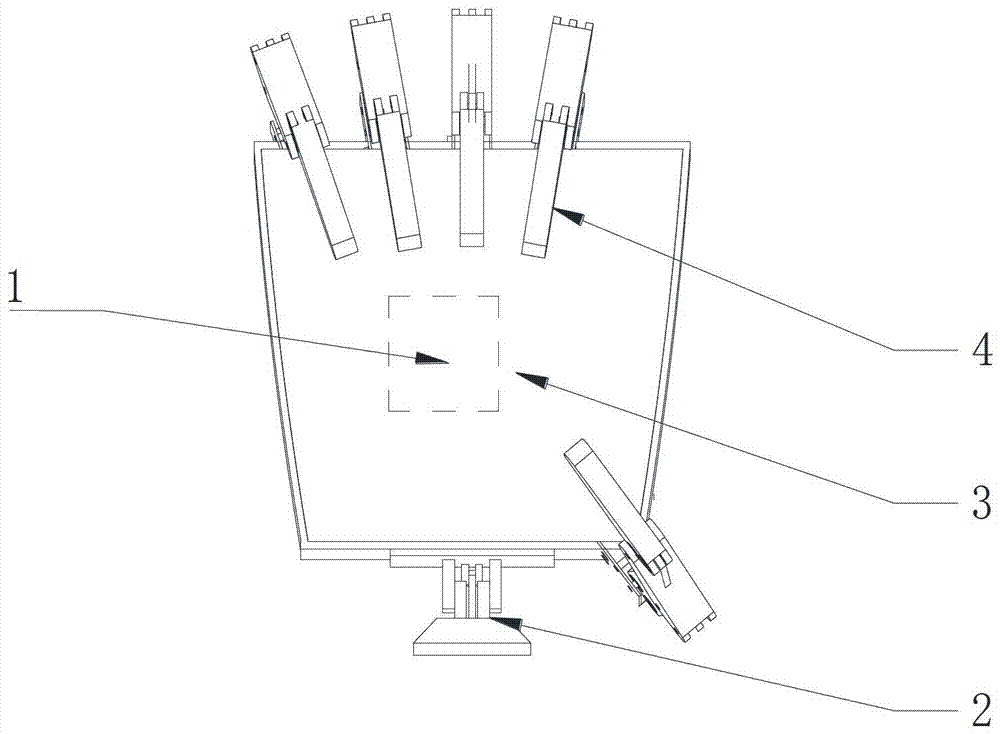
[0035] Such as figure 1 The humanoid prosthetic hand based on the coupling link of the present embodiment includes a wrist 2, a palm 3 connected with the wrist 2 to carry and fix five fingers, a finger 4, and a control system 1 that provides power and control signals for the prosthetic hand.
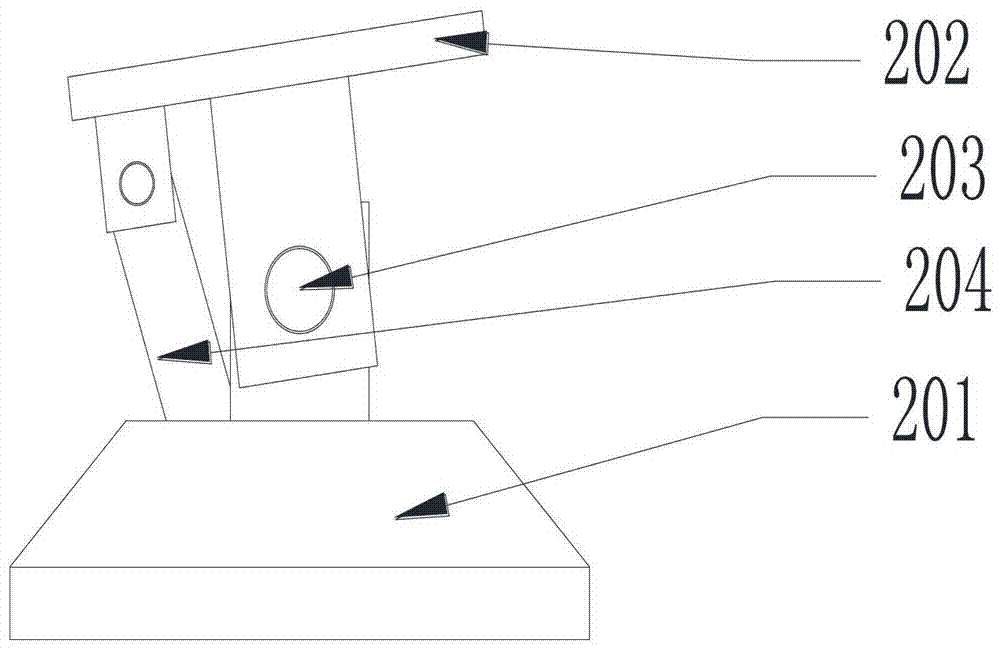
[0036] Such as figure 2Wrist 2 includes a disc-shaped base 201, a palm fixed disc 202, a connecting shaft 203 connecting the disc-shaped base and the palm fixed disc, a servo motor fixed in the disc-shaped base, a crank is assembled on the servo motor, and the crank and the palm fixed disc are connected 202 of the connecting rod 204 .
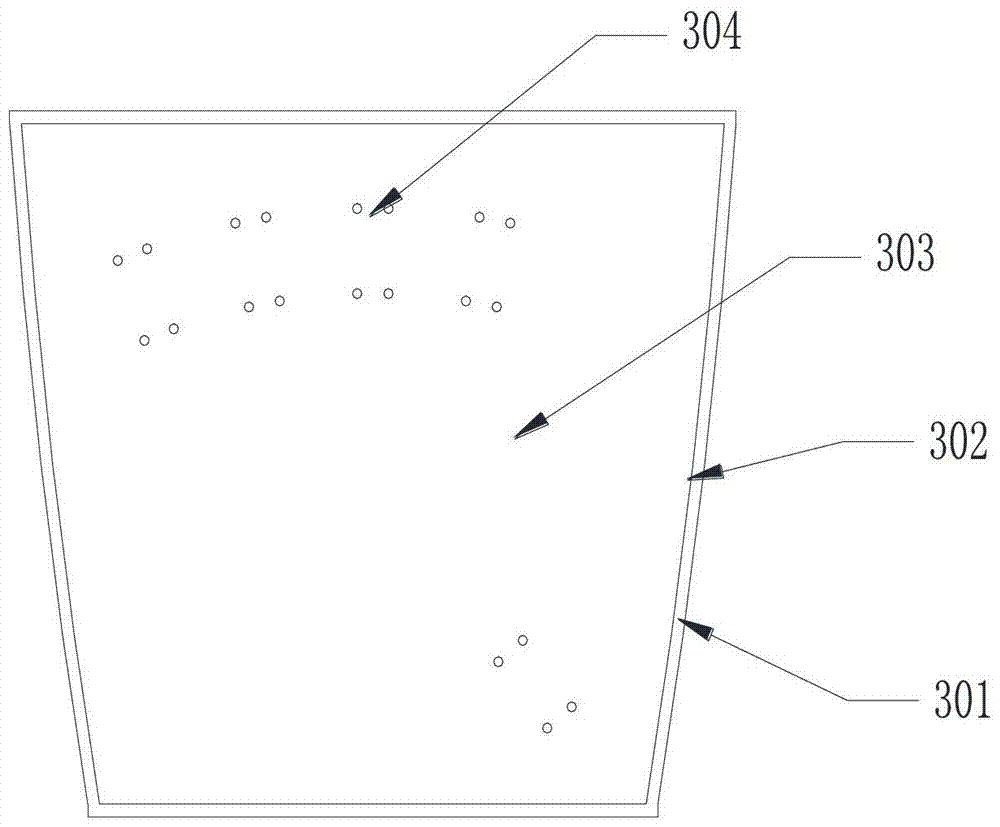
[0037] Such as image 3 , the palm is set above the wrist, including the front face 301 and the back face 303, five groups of finger fixing holes 304 are arranged on the back face, and five groups of finger fixing holes 304 are arranged on the front face corresponding to the same size and shape. The grooves, the grooves and the finger fixing holes 304...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More