

A parallel micro-manipulation robot
A micro-manipulation and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as low motion resolution, less operating freedom, and small operating range, achieving high motion resolution, improving operating performance, The effect of a large operating range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
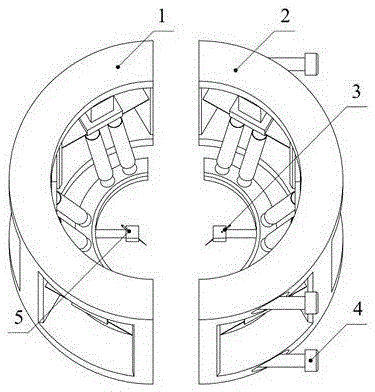
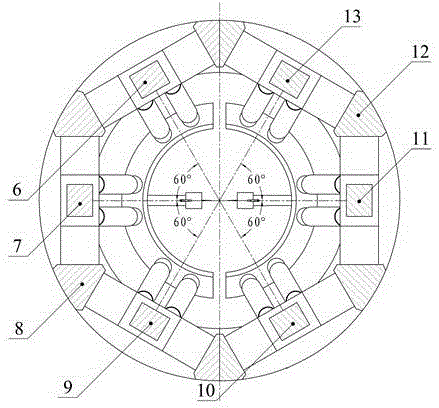
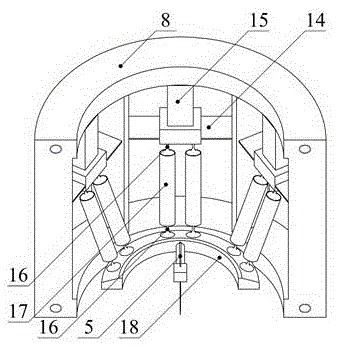
[0016] Such as figure 1 with figure 2 The parallel micro-manipulation robot shown includes a left micro-manipulator 1 and a right micro-manipulator 2 with the same structure and arranged symmetrically. The left micromanipulator includes a semi-cylindrical left micromanipulator mobile phone holder 8, the first branch chain 6, the second branch chain 7, the third branch chain 9, the left micromanipulator manual platform 18 and the left micromanipulator hand end tool 5. The right micromanipulator includes a semi-cylindrical right micromanipulator mobile phone holder 12, the fourth branch chain 10, the fifth branch chain 11, the sixth branch chain 13, the right micromanipulator manual platform and the right micromanipulator end tool 3.
[0017] image 3 In the left micro-manipulator shown, each branch chain includes a micro-displacement driver 15, a flexible moving pair 14 and two branches with the same structure, and each branch is composed of two flexible ball joints 16 and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More