

A lane-changing trajectory optimization and visualization method based on vehicle type and vehicle speed
A trajectory optimization and implementation method technology, applied in the field of intelligent transportation, vehicle system dynamics and traffic safety research and simulation, can solve the problems of not being able to observe vehicle lane changing behavior in real time, ignoring curvature changes, and ignoring
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
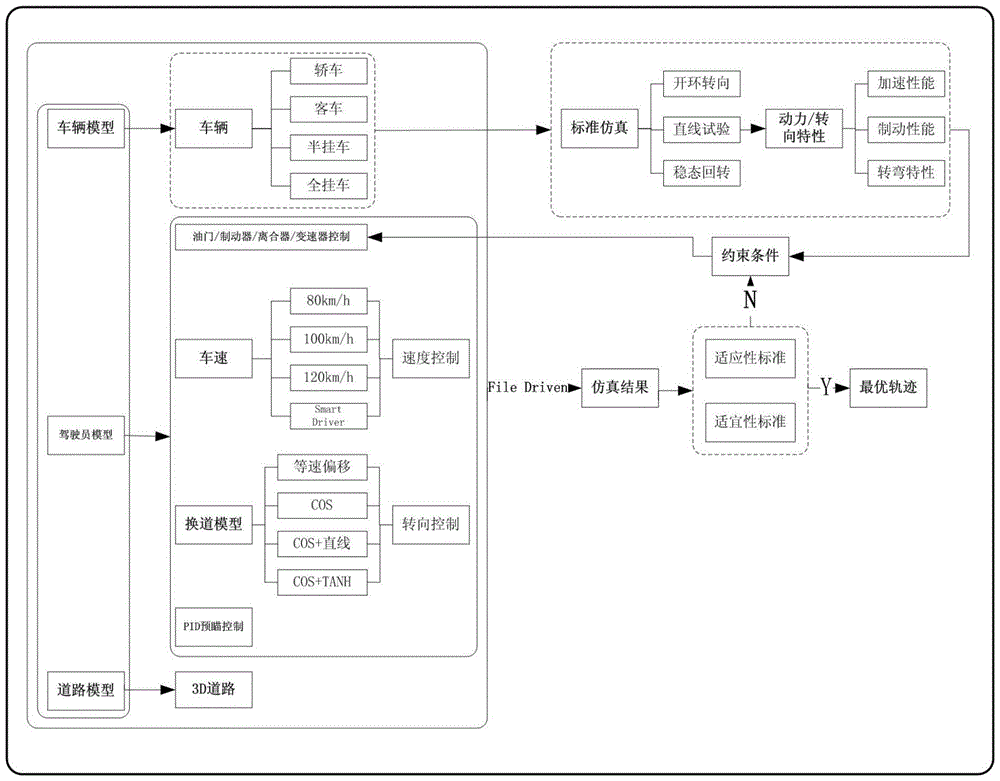
[0050] Embodiment: Based on the vehicle lane change trajectory optimization method and visualization of different vehicle types, the method includes the following steps:
[0051] (1) Retrieving vehicle dynamics models of different types of vehicles, including the following steps:
[0052] (1-1) Select ADAMS2012, enter the ADAMS / Car module, and retrieve four types of vehicle dynamic models from the model library (sedan MDI_DEMO_VEHICLE, passenger car MSC_BUS_RIGID, semi-trailer MSC_TRACTOR_SEMITRAILER, full-trailer MSC_TRACTOR_UNIT); vehicle parameters, such as Table 1 shows.
[0053] (1-2) Carry out open-loop steering test, straight line test, and curve steering test on four types of vehicles to obtain the maximum speed, maximum acceleration, braking efficiency, and directional stability of the vehicle during braking. Specifically, the following simulation tests are included: open-loop steering simulation (angle pulse steering simulation, single line shifting simulation), str...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More