

Cross-shaped parallel robot
A robot and cross-type technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of difficult control of the positional accuracy of the execution part, insufficient rigidity of the overall structure, and high manufacturing costs, reducing the mass of the motion load and improving the motion. The effect of speed, low manufacturing cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
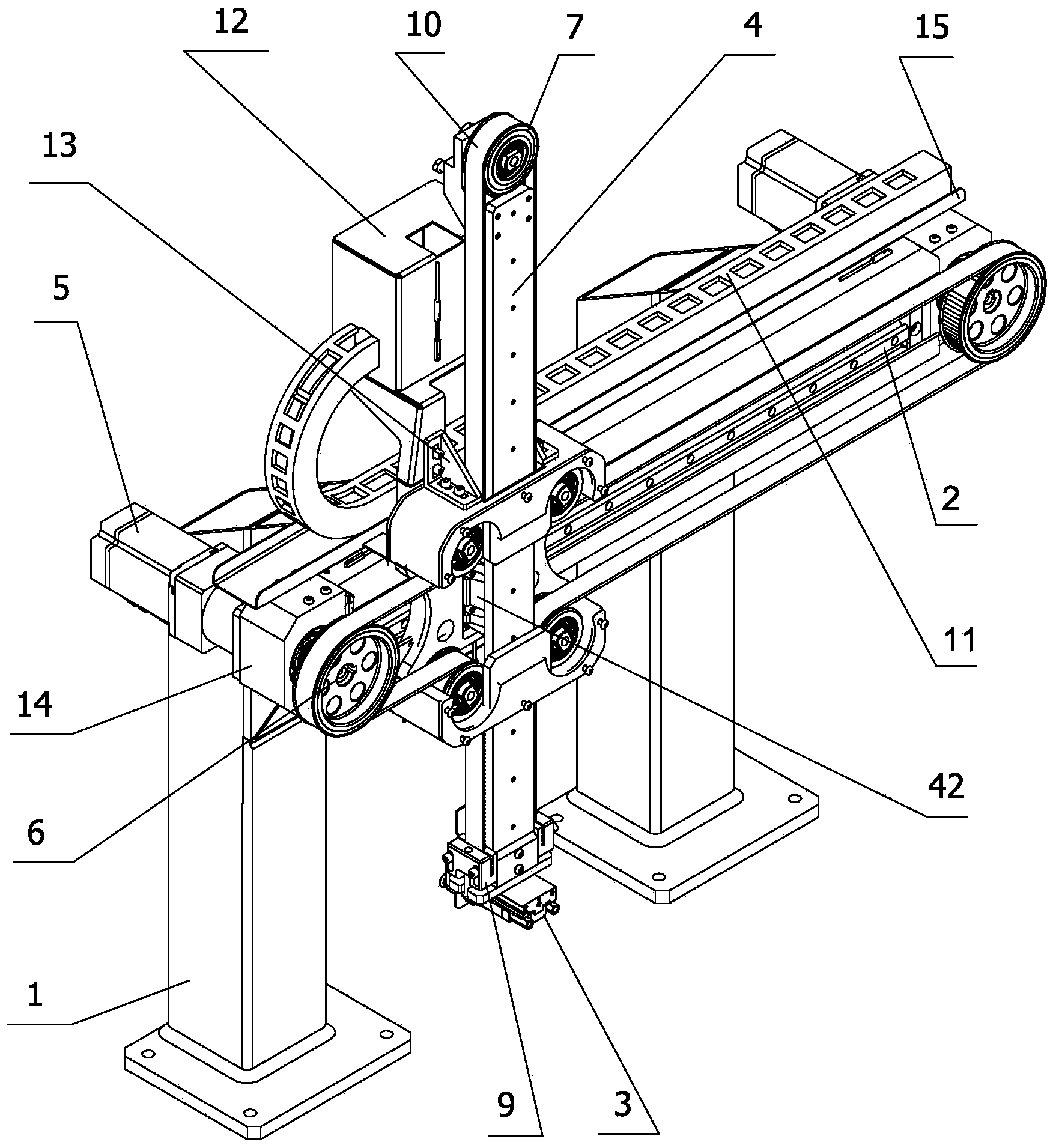
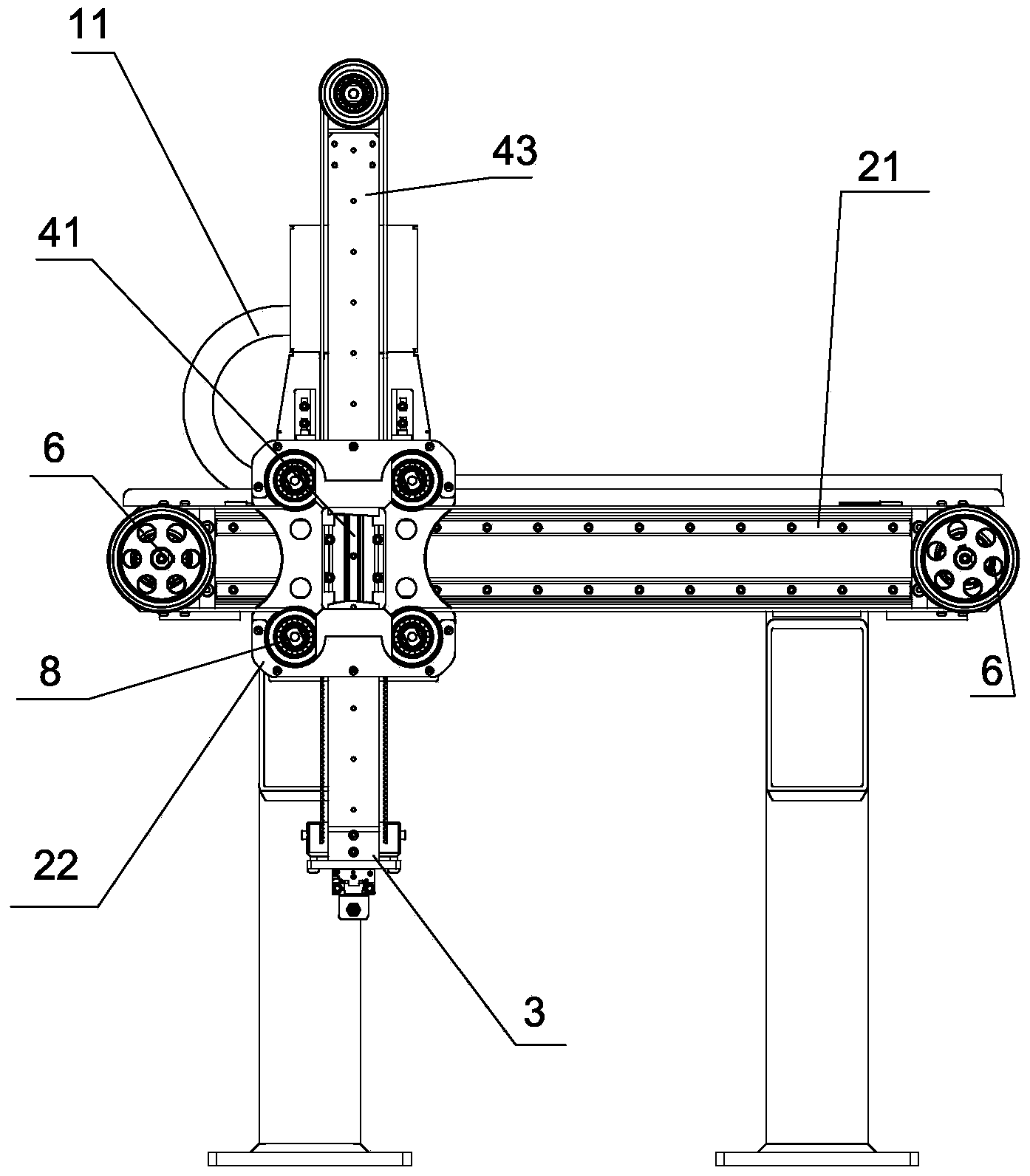
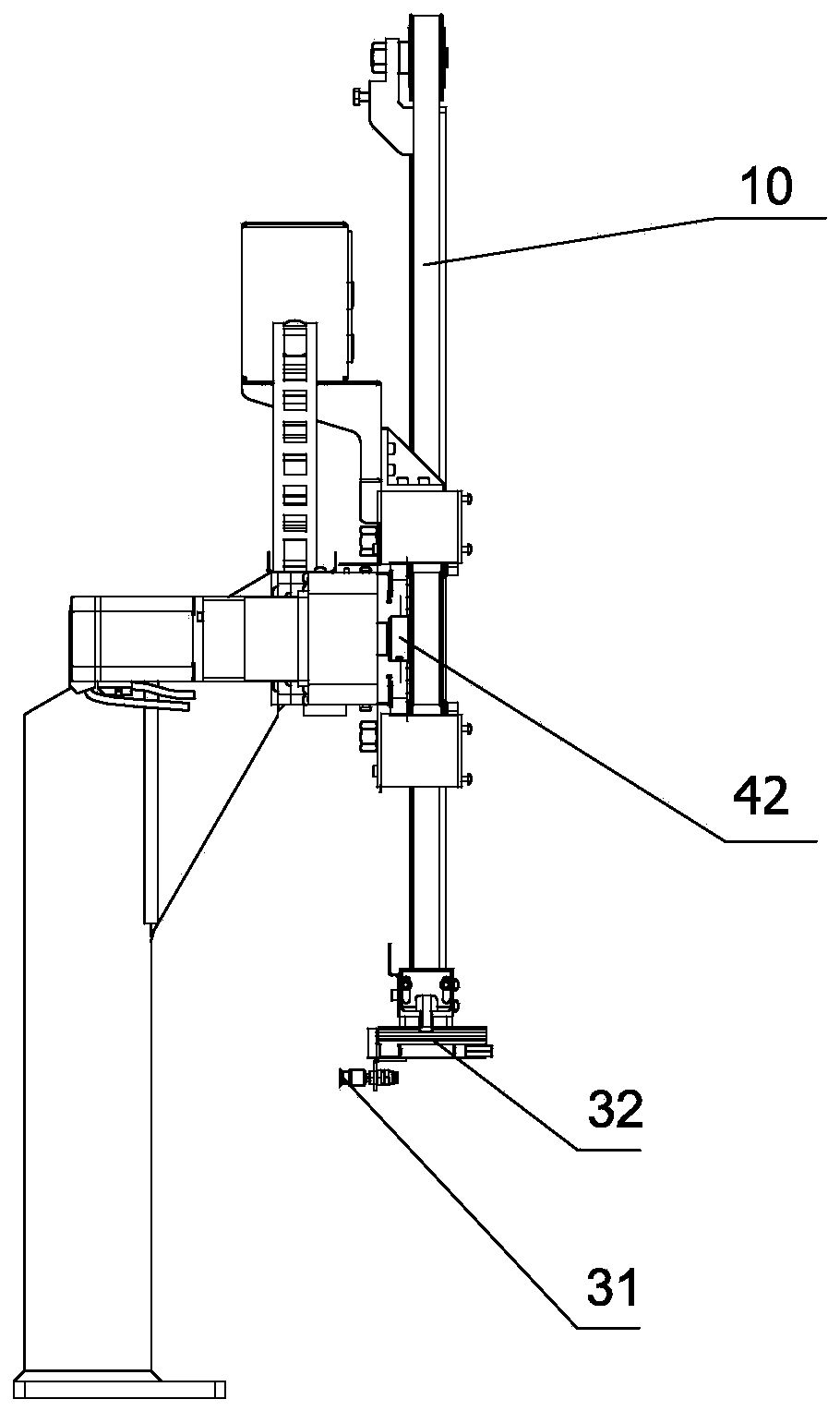
[0021] combine figure 1 —— image 3 As shown, a cross-type parallel robot consists of two columns 1, X-direction assembly 2, Y-direction assembly 3, Z-direction assembly 4, two driving motors 5, two driving synchronous pulleys 6, two driven synchronous Belt pulley 7, four idler pulleys 8, synchronous belt locking block 9, synchronous belt 10, towline 11, towline box 12, towline groove 15 etc. are formed.
[0022] There are two columns 1 arranged at intervals from left to right. The X-direction assembly 2 is composed of an X-direction rail 21 and an X-direction slide plate 22. The left and right ends of the X-direction rail 21 are fixedly connected with the column 1 on the corresponding side. The column 2 is used to support the X-direction rail 21, and the X-direction slide The plate 22 is slidably connected to the X-direction rail 21, preferably, the X-dir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More