

Multi-coordinate machining center combination method based on vision and movable mechanical arm
A technology of moving manipulators and combining methods, applied in the fields of machinery and information, can solve the problem of not being able to directly combine multi-coordinate machining centers, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
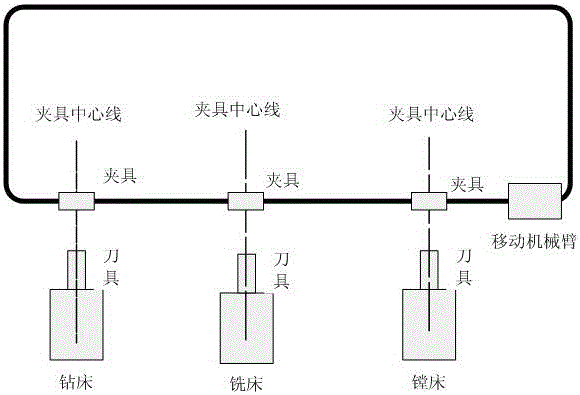
[0022] refer to figure 1 .
[0023] (1) Set processing tasks and procedures on the mobile manipulator, boring machine, milling machine, and drilling machine; set the track of the mobile manipulator so that the mobile manipulator can move on the track; arrange the boring machines, milling machines, Drilling machine, so that the boring machine, milling machine, and drilling machine tool face the track of the mobile manipulator and are perpendicular to the track. The vertical line is used as the clamp centerline of the mobile manipulator. When the gravity center line of the mobile manipulator is in line with the boring machine, milling machine or When the centerlines of the fixtures in front of the drilling machine intersect, the mobile robot arm stops moving and is locked by the fixture. After multi-coordinate alignment and accurate positioning, the processing is carried out, and the accumulated error correction of online processing is performed. After the processing is complete...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More