A crawler deformable robot mobile platform
A mobile platform and robot technology, which is applied in motor vehicles, tracked vehicles, transportation and packaging, etc., can solve the problems that the auxiliary swing arm module does not achieve much effect, the friction between the track and the ground, and the low speed of the smooth road, etc., to achieve strong The effect of autonomous terrain adaptability, reducing friction and increasing the speed of wheeled movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the embodiments and accompanying drawings. The embodiment is a specific implementation carried out on the premise of the technical solution of the present invention, and provides detailed implementation methods and processes, but it is not used as a limitation to the scope of protection of the claims of the present application.
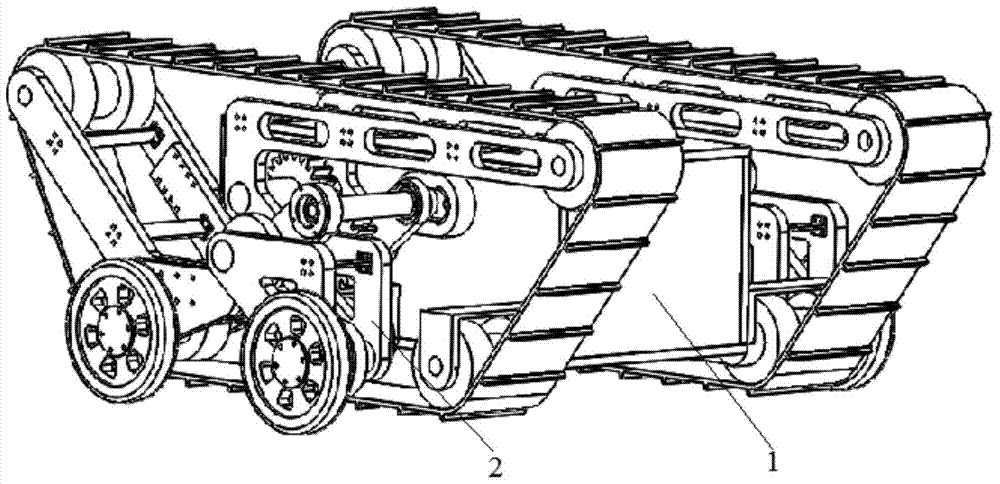
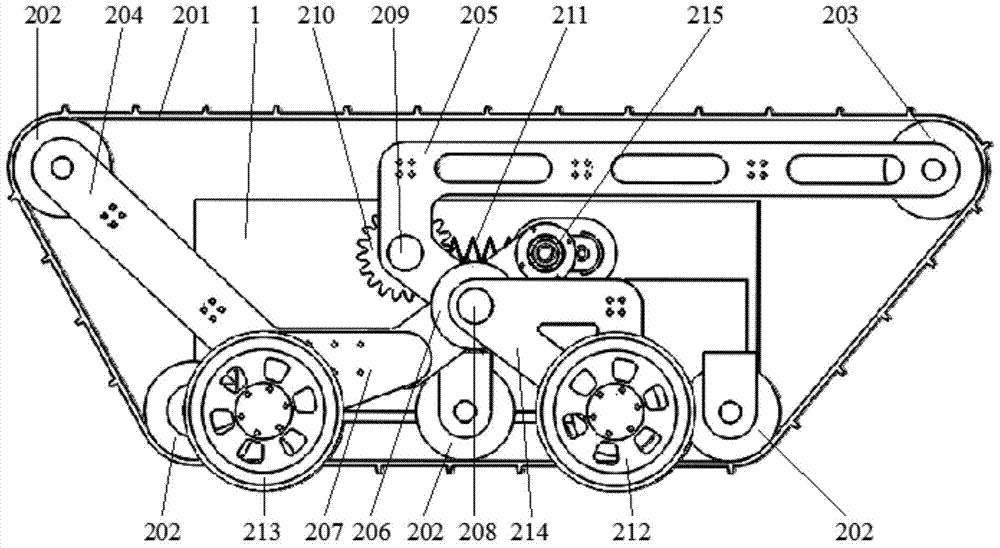
[0028] The crawler deformable robot mobile platform of the present invention (abbreviation mobile platform, see Figure 1-10 ) includes a robot body 1 and two wheel-shoe composite modules 2, and the two wheel-shoe composite modules 2 are symmetrically arranged on both sides of the robot body 1;
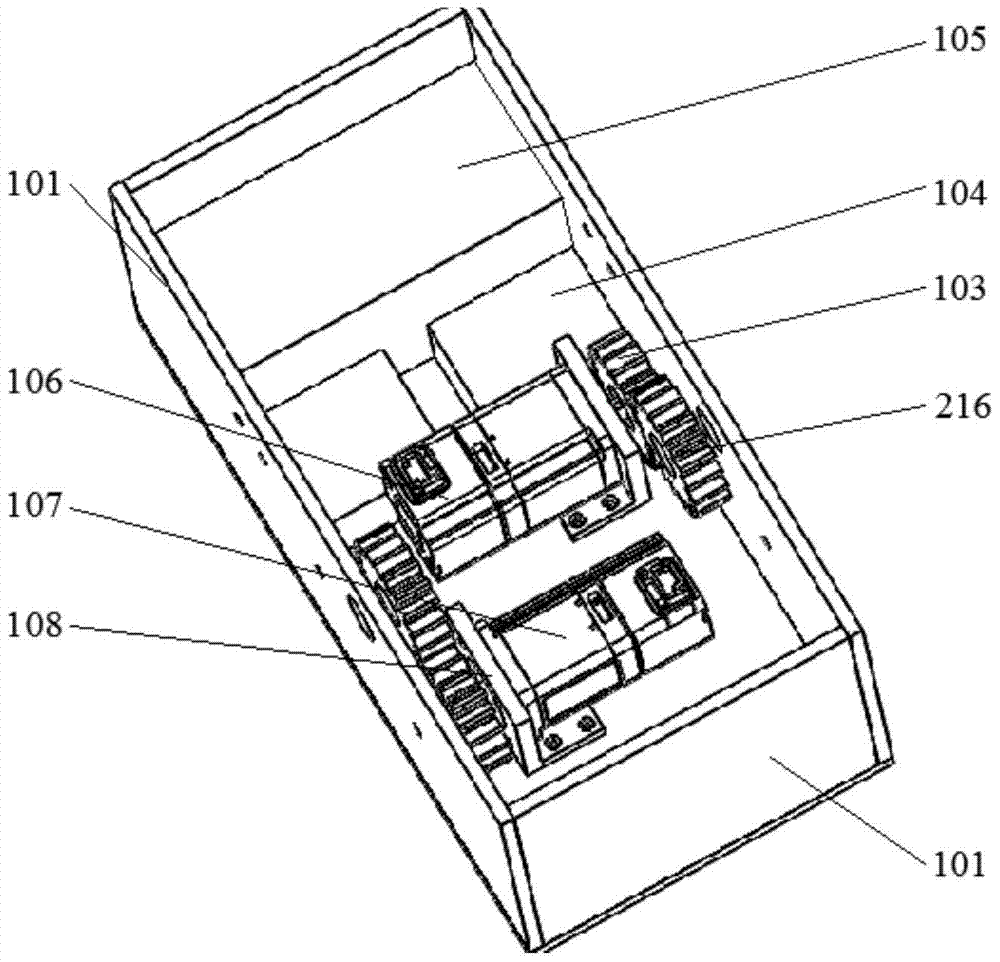
[0029] The robot body 1 (see figure 2 ) includes a box body plate 101, a power supply 105, a motor driver 104 and two reversely installed drive systems, the power supply 105, the motor driver 104 and the two drive systems are all installed in the box body plate 101, and the two...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More