

Low-frequency series-connection humanoid four-degrees-of-freedom mechanical foot
A technology of degrees of freedom and mechanical feet, applied in the field of humanoid robots, can solve the problems of less movement of the mechanical feet, not conforming to the movement characteristics of human feet, etc., and achieve the effect of reasonable structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
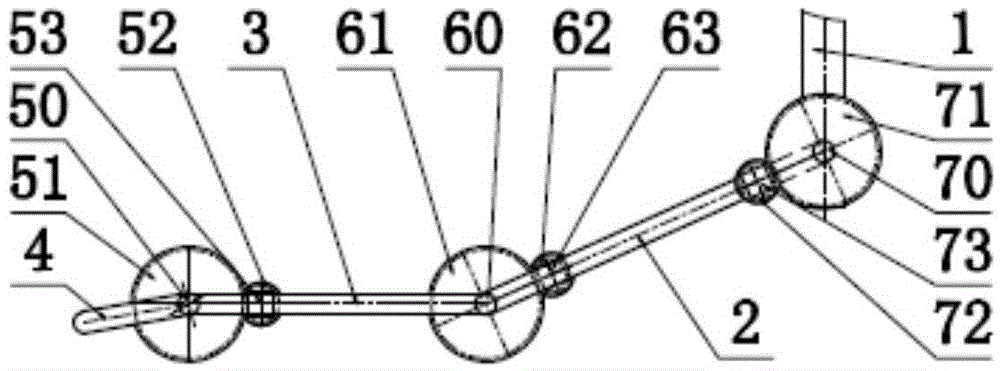
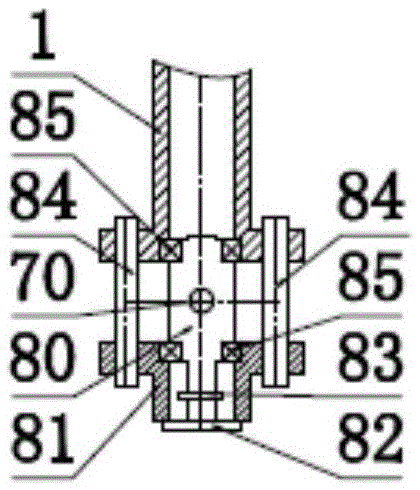
[0013] see figure 1 and figure 2 As shown, the low-frequency serial humanoid four-degree-of-freedom mechanical foot of the present invention includes toes 4, metatarsal rods 3, tarsal rods 2, toe shafts 50 connecting metatarsal rods 3 and toes 4, and connecting tarsal rods 2 and metatarsal rods 3. Tarsus axis 60, ankle joint axis A70 connecting tarsus bar 2 and mechanical calf 1, ankle joint axis B80 perpendicular to ankle joint axis A70, two bolts 84, flange 81, installed on metatarsal bar 3 The toe motor 53 on the top, the toe pinion 52 installed on the toe motor 53 output shaft, the toe gear 51 installed on the toe shaft 50 and the toe pinion 52 meshing transmission, installed on one end of the tarsus bar 2 The tarsus motor 63, the tarsus pinion gear 62 installed on the tarsus motor 63 output shaft, the tarsus large gear 61 inst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More