

Single-freedom rehabilitation mechanical hand driving device
A driving device and manipulator technology, applied in the field of medical robots, can solve problems such as rope drive tension, rope friction, deformed rope, etc., and achieve the effects of overcoming tension problems, avoiding injuries, and reducing weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
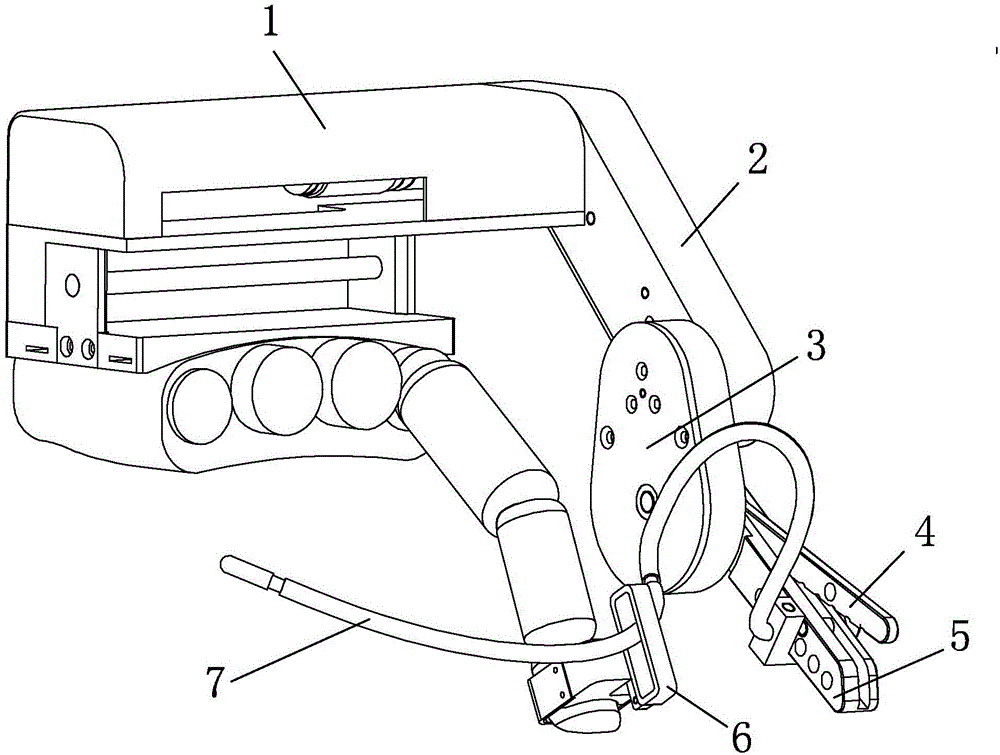
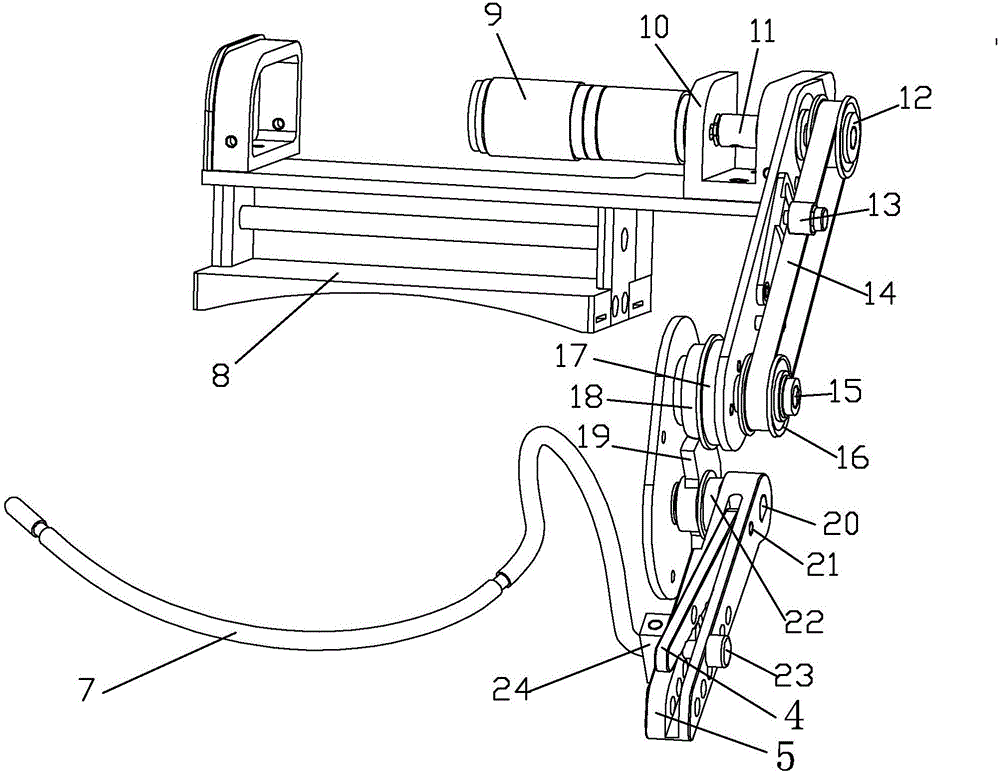
[0027] Specific implementation mode one: as Figure 1-7 As shown, the driving device of the single-degree-of-freedom rehabilitation manipulator in this embodiment includes a driving device 1, a first connecting rod 2, a second connecting rod 3, a third connecting rod 5, a locking slot 4 and a driving rod 7; The driving device 1 includes a driving motor 9 and a motor base 10, the motor base 10 is fixed on the contact base 8, the driving motor 9 is installed on the motor base 10, the first link 2 is provided with a synchronous toothed belt mechanism, and the synchronous teeth The shaped belt mechanism includes a first joint shaft 11, a second joint shaft 15, a first synchronous pulley 12, a second synchronous pulley 16 and a synchronous belt 14, and one end of the first link 2 is fixedly connected to the motor base 10, The output shaft of the driving motor 9 passes through one end of the first connecting rod 2 and is fixedly connected to the first joint shaft 11, the first synch...
specific Embodiment approach 2
[0028] Specific implementation mode two: as figure 2 As shown, the bottom end surface of the contact base 8 in this embodiment is provided with a soft, extensible sponge material. With such a design, it can adapt to the size of different patients' hands. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0029] Specific implementation mode three: as figure 1 and figure 2 As shown, the driving rod 7 in this embodiment is an S-shaped driving rod. With such a design, the S-shape can drive the fingers to perform flexion and extension movements, as well as adduction and abduction movements. Other compositions and connections are the same as those in Embodiment 1 or 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More