

Multi-rotor unmanned aerial vehicle emergency parachuting device with adaptive ejection angle adjustment function and method
A multi-rotor UAV and self-adaptive adjustment technology, applied in the field of agricultural UAV research, can solve problems such as crashes, bombings, and reducing the success rate of UAV self-rescue.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
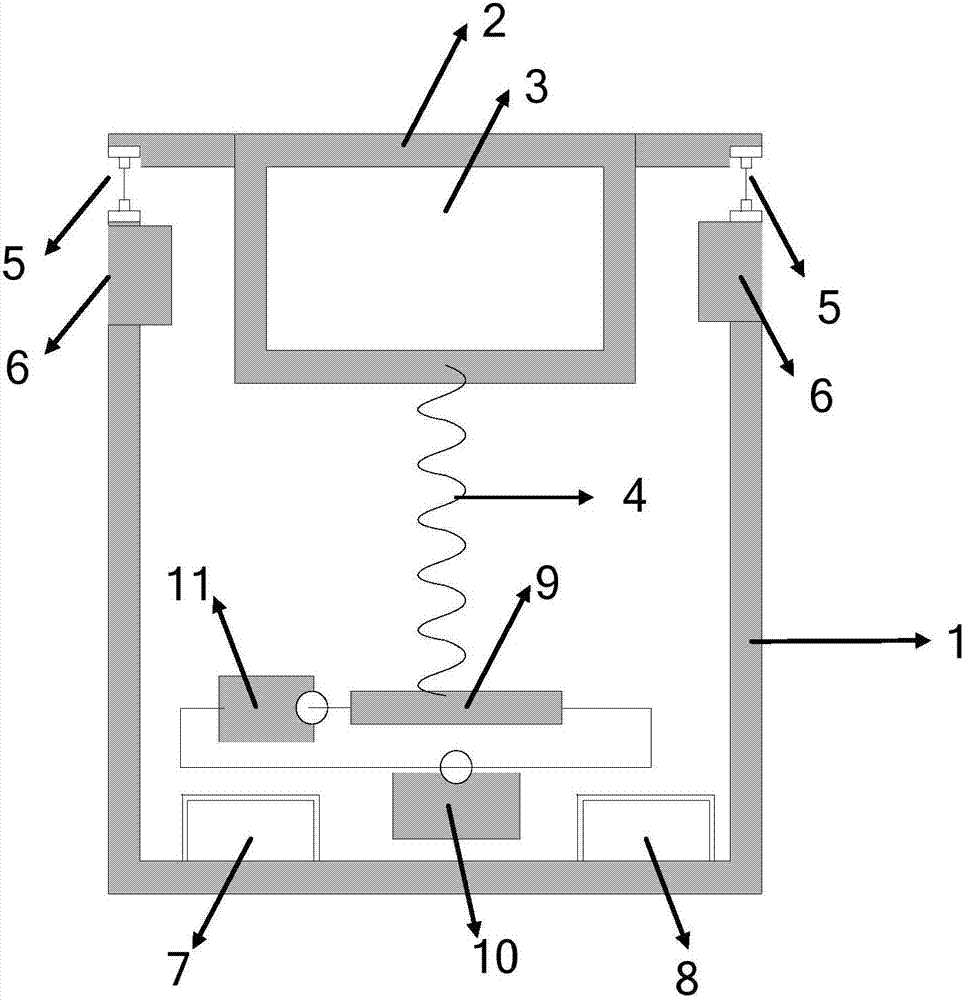
[0042] Such as figure 1 As shown, the present embodiment provides a multi-rotor unmanned aerial vehicle emergency parachute device, which device includes an umbrella compartment 1, an umbrella compartment cover 2, a parachute 3, a parachute throwing spring 4, a lock bolt 5, an unlocking steering gear 6, a micro Controller 7, inertial motion measurement unit 8 and spring support rotation device.
[0043] There are two locking bolts 5 and two unlocking steering gears 6 respectively, and the two unlocking steering gears 6 are respectively fixed on the side walls of the umbrella compartment 1. The two locking bolts 5 are respectively located above the two unlocking steering gears 6, and respectively The two unlocking steering gears 6 are connected, and the umbrella cover 2 is fixed on the umbrella housing 1 under the joint action of the lock bolt 5 and the unlocking steering gear 6, and the umbrella housing 1 is fixed on the multi-rotor UAV.
[0044] Described parachute 3, parachut...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More