

Lower limb rehabilitation walking-aid robot capable of supporting omnidirectional movements and control method thereof
A walking-assisting robot, omni-directional mobile technology, applied in the direction of equipment to help people walk, passive exercise equipment, sports accessories, etc., can solve the problems of disadvantages, adjustment of training plans, and inability to use robots, etc., to achieve the effect of convenient installation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] Below in conjunction with specific embodiment, further illustrate the present invention. It should be understood that these examples are only used to illustrate the present invention and are not intended to limit the scope of the present invention. In addition, it should be understood that after reading the teachings of the present invention, those skilled in the art can make various changes or modifications to the present invention, and these equivalent forms also fall within the scope defined by the appended claims of the present application.
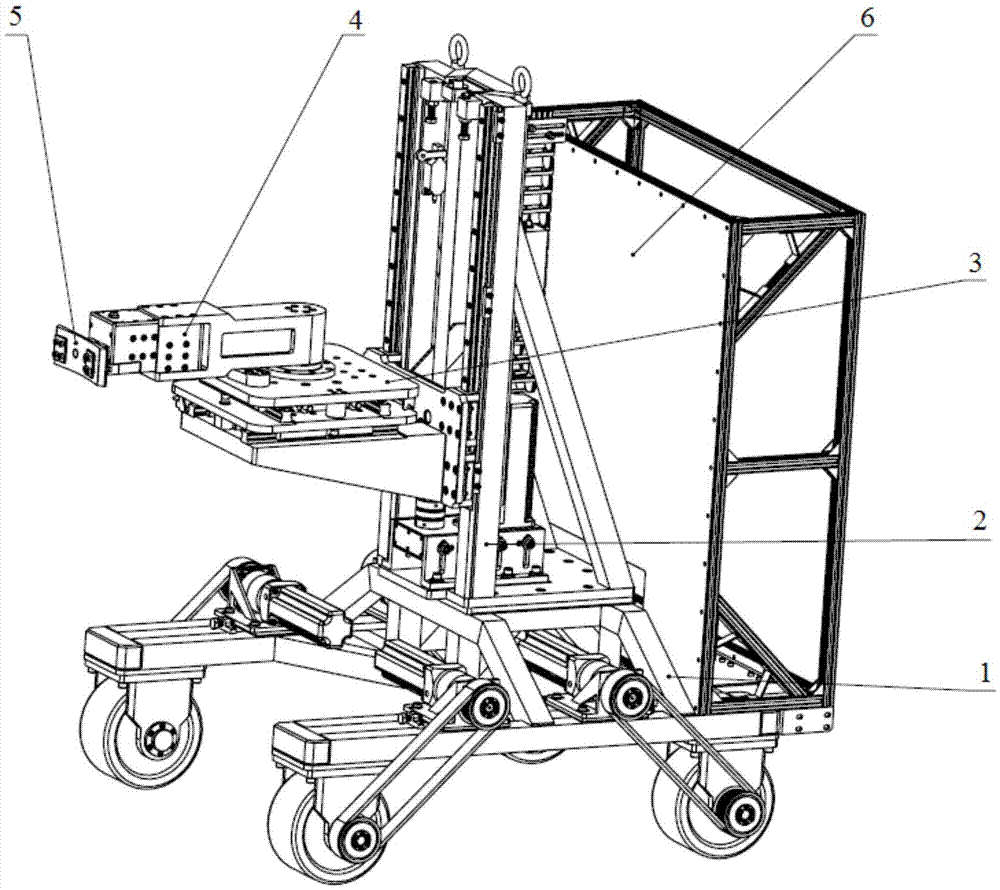
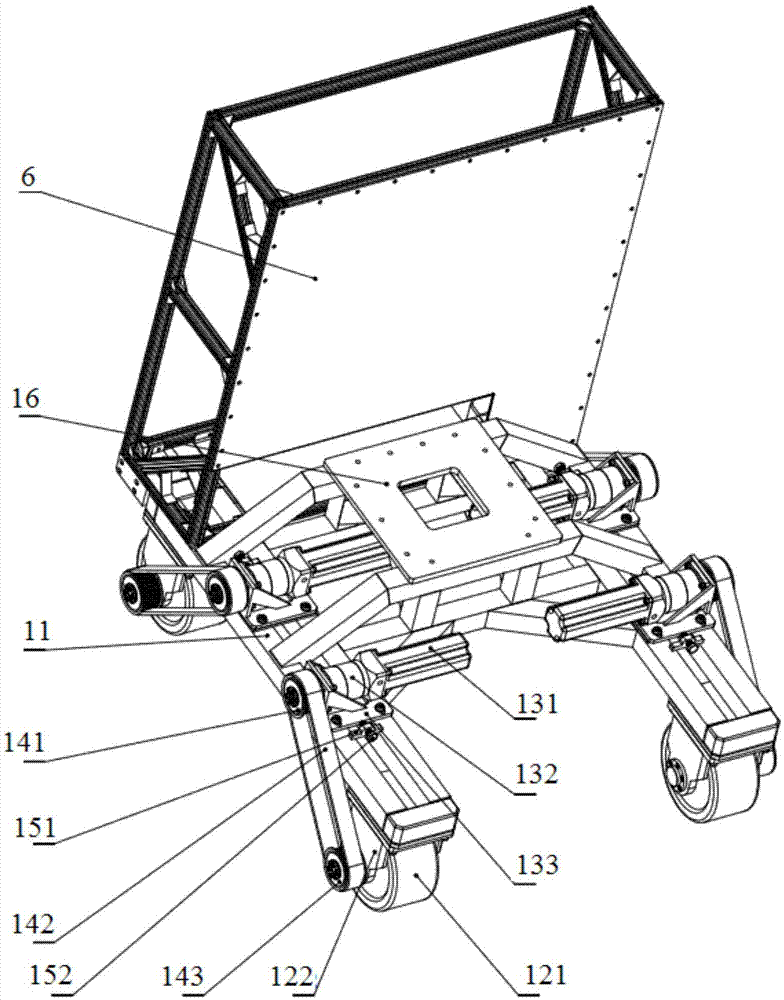
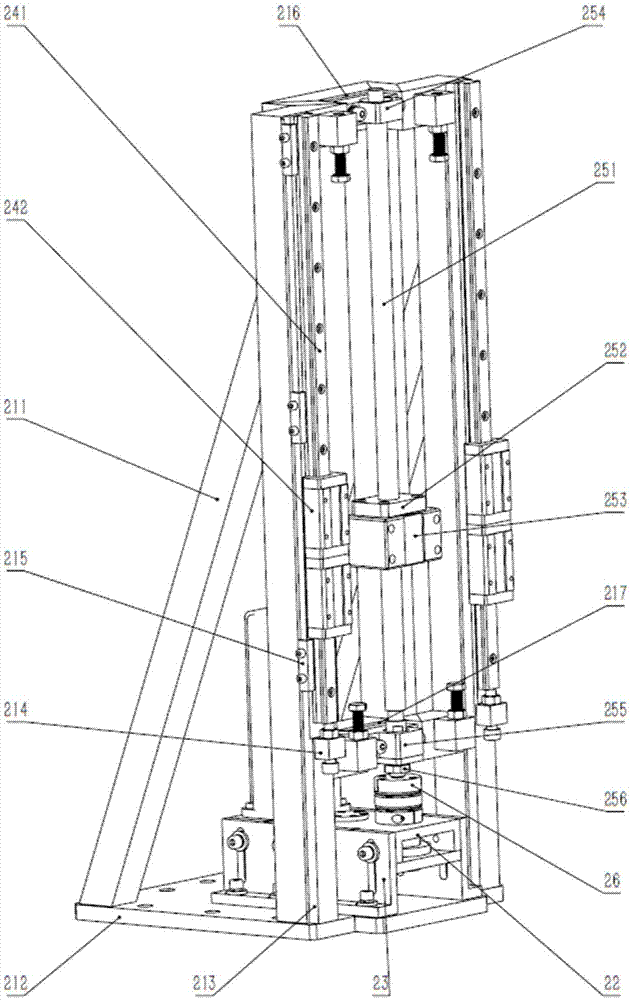
[0056] The invention relates to a walking aid robot for rehabilitation of lower limbs supporting omnidirectional movement, which includes a car body module, a lifting module, a support module, a tension module and a quick connection module, and the car body module is used for omnidirectional movement of the robot for realization and use The coordinated movement of the user; the lifting module is vertically connected to the vehi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More