

Signal processing method for anti-collision system in complex environment of unmanned vehicles based on combined waveform
A technology for unmanned vehicles and complex environments, applied in the field of signal processing, to solve problems such as collision avoidance in complex environments
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
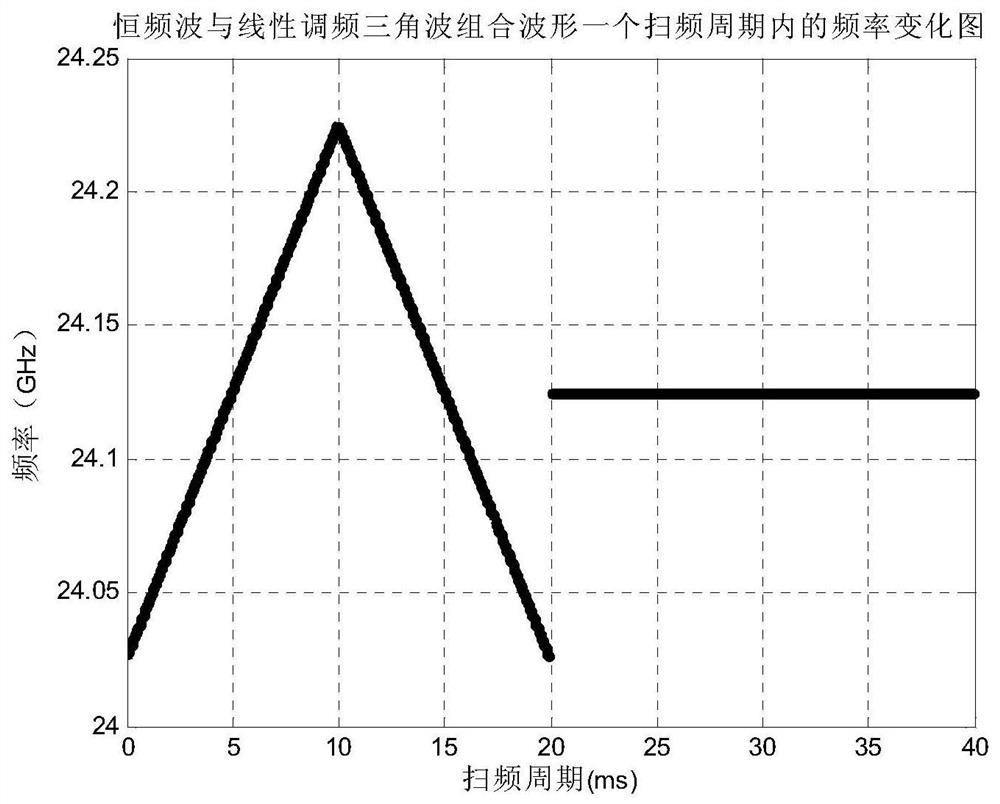
[0021] Embodiment 1: A signal processing method for an unmanned vehicle complex environment anti-collision system based on a combined waveform, the combined waveform is a waveform composed of a triangular wave modulated FMCW signal and a constant frequency wave modulated CW signal, the first section is a triangular wave, and the second segment is a constant frequency wave;
[0022] The signal processing method includes the following steps:
[0023] S1. For each segment of the waveform, the IQ data collected by the A / D is subjected to time-frequency FFT transformation, and the time domain data is converted into frequency data;
[0024] S2. Use the complex modulus value after the FFT transformation of each segment of the waveform as the threshold detection CFAR, output the position of the threshold point, calculate the corresponding frequency value according to the point of the threshold, and thus obtain the frequency matrix at the corresponding point, and calculate at the same ...
Embodiment 2
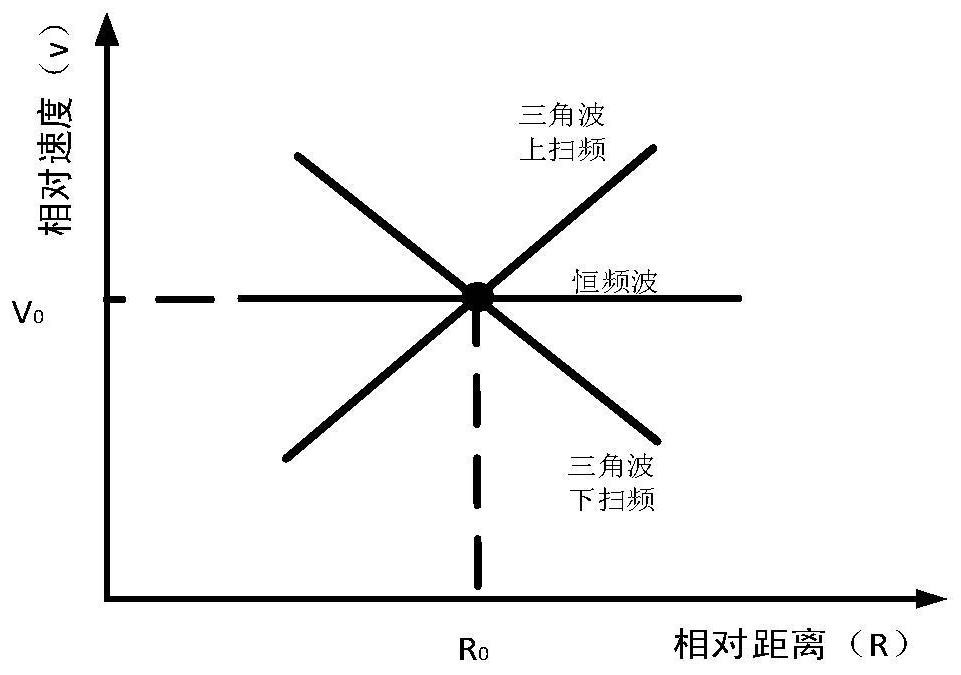
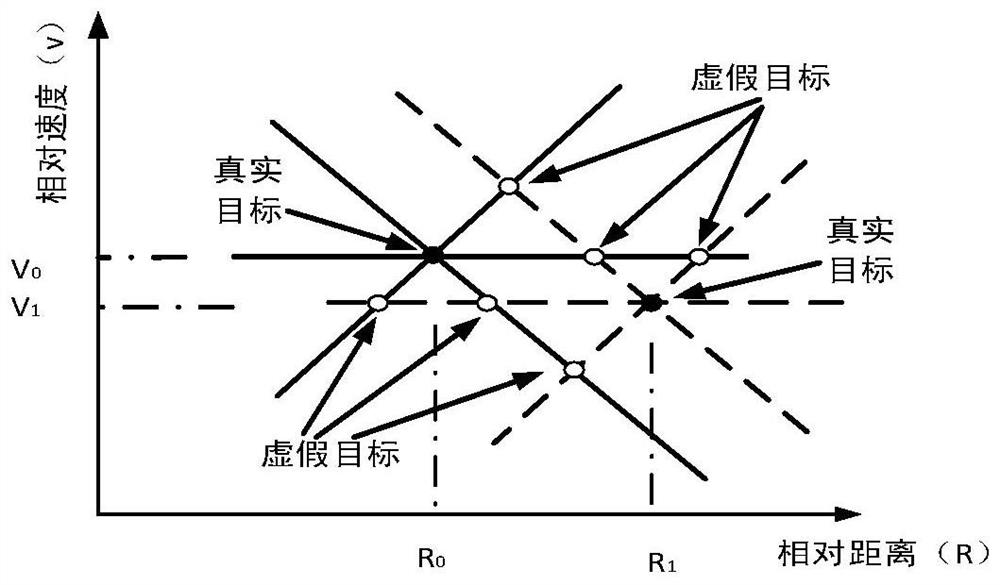
[0038] Embodiment 2: As a supplement to Embodiment 1, for the unmanned vehicle to be able to avoid obstacles in a complex environment, it is required that the unmanned vehicle anti-collision millimeter-wave radar can realize the simultaneous detection of multiple targets. There are many main methods for realizing multi-target detection by millimeter waves. In this embodiment, a combination waveform using triangular waves and constant-frequency waves is used to realize the accurate detection function of multiple targets. In this embodiment, the central frequency of the millimeter wave is 24 GHz or 77 GHz, and the waveform adopts a waveform based on a combination of a CW signal modulated by a constant frequency wave and an FMCW signal modulated by a triangular wave. The waveform transmission form is that the first segment is a triangular wave, the working frequency ranges from 24.025GHz to 24.225GHz, the bandwidth is 200MHz, the triangular wave period is 20ms, the second segment ...
Embodiment 3
[0054] Embodiment 3: For the peak processing in each of the above solutions, this embodiment provides a peak processing method applied to driverless car signals:
[0055] Set a peak point threshold factor α, which is used to limit the absolute value of the difference between the detected maximum peak point crossing the threshold and the maximum peak point that appeared in the previous cycle, so that the absolute value of the difference must not be greater than the peak point threshold factor α:
[0056] The expression is as follows:
[0057] |L_max(k)-L_max(k-1)|≤α;
[0058]
[0059] Among them: L_max(k) is the coordinate of the maximum peak point crossing the threshold in k period, L_max(k-1) is the coordinate of the maximum peak point in the previous period, and k represents the kth moment; v max is the maximum speed of the driverless car, λ is the millimeter-wave radar wavelength, fs is the sampling rate, and N is the number of FFT points;
[0060] If at time k, the ab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More