

Calculation method of optimal off-ramp intention generation point for autonomous vehicles
A technology of automatic driving and computing methods, applied in computing, traffic control systems of road vehicles, data processing applications, etc., can solve problems such as finding automatic driving vehicles, and achieve the effect of ensuring driving safety, reducing impact, and improving traffic capacity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] A method for calculating the optimal intention generation point of an automatic driving vehicle in an off-ramp scene of an expressway, comprising the following content:
[0034] 1. Probability model for successful lane change in two lanes
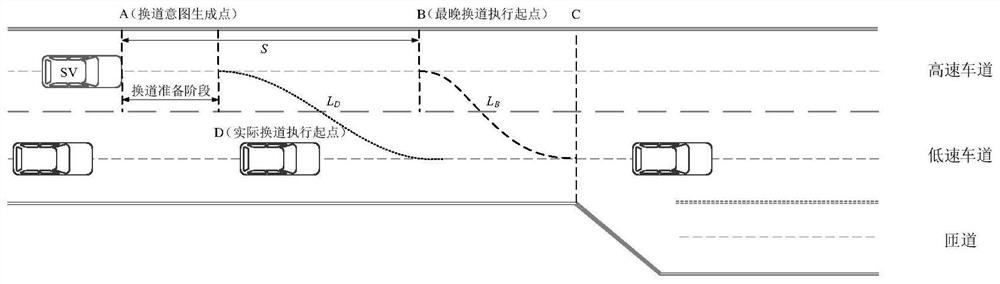
[0035] The background described by this model is as follows figure 1 As shown, it is the most basic highway off-ramp lane change scenario. In order for the vehicle SV to enter the ramp exit deceleration lane at the speed limit, it must change from the high-speed lane to the low-speed lane at or before point C (that is, the starting point of the ramp) . Point B is the starting point of the latest lane change execution, L B is the latest lane change trajectory, L D is the actual lane change trajectory. In order to determine the time T for the lane-changing vehicle SV to find a suitable headway, it is first necessary to perform global optimization of the lane-changing trajectory, that is, to determine the position of point B. Assum...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More