A dynamic model/airborne sensor integrated navigation method for quadrotor aircraft
A technology of quadrotor aircraft and dynamic model, which is applied in the field of integrated navigation, can solve the problems of decreased accuracy of navigation system, decreased performance, low accuracy and reliability of inertial sensors, etc., and achieves the effect of improving the reliability of navigation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
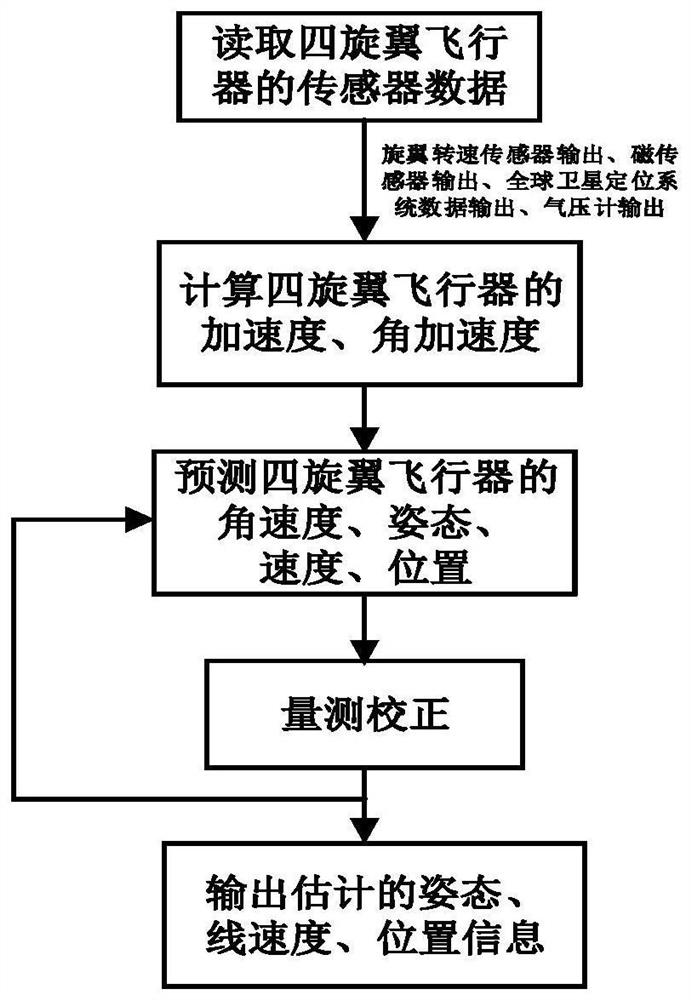
[0060] The process of the method of the present invention is like figure 1 As shown, the specific steps are as follows:
[0061] Step 1: The cycle reads the K time four-rotor aircraft load cell, including rotor speed sensor information Ω 1 (k), Ω 2 (k), Ω 3 (k), Ω 4 (k), which is the speed of four rotors; GPS information V NG (k), V EG (k), V DG (k), which is the north to speed, east-to-race, and speed, P NG (k), P EG (k), it is the north direction, east position; H b (k) is the air pressure height meter information; ψ m (k) is a magnetic sensor information;
[0062] Step 2: Calculate the acceleration and angular acceleration of the K-time four-rotor aircraft;
[0063] The acceleration information is calculated by the following formula:
[0064]
[0065]
[0066]
[0067] The angular acceleration information is calculated by the following formula:
[0068]
[0069]
[0070]
[0071] Step 3: Predict the angular velocity, gesture, speed, location of the K time four-rotor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More