

A Motion Planning Method for Unmanned Vehicle Based on Trajectory Unit
A technology of motion planning and unmanned boats, applied in data processing applications, predictions, instruments, etc., can solve the problems of low controllability of unmanned boats and low degrees of freedom, and achieve the effect of solving the combination problem
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
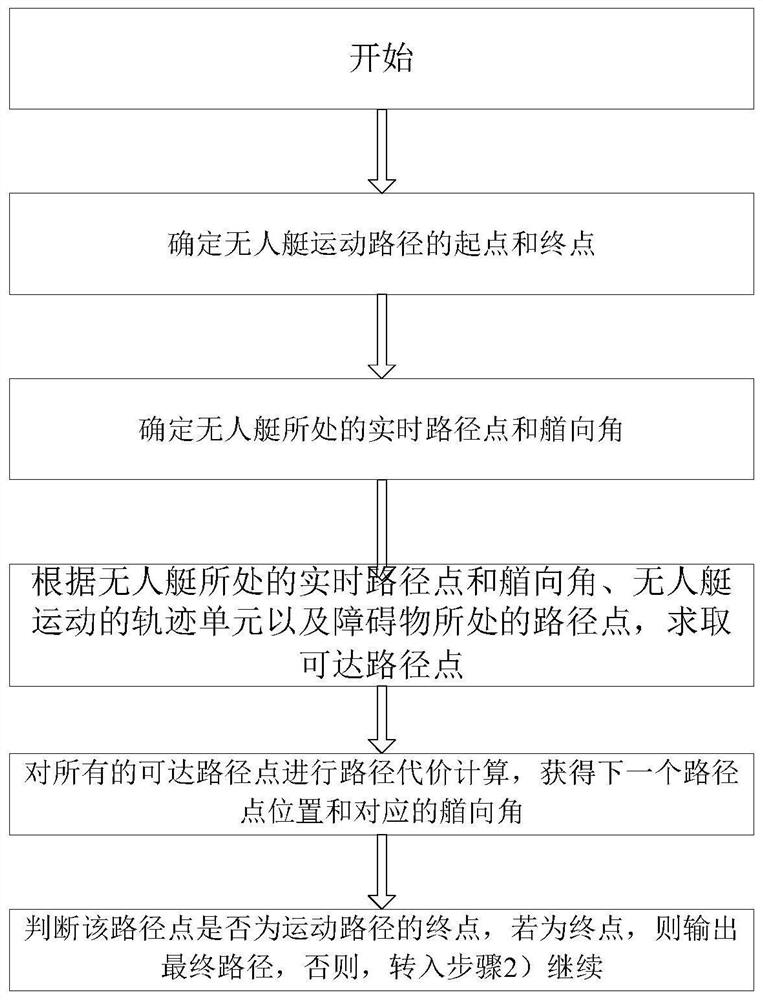
[0049] Such as figure 1 As shown, a trajectory unit-based motion planning method for unmanned boats, including the following steps:
[0050] 1) Determine the starting point and end point of the motion path of the unmanned vehicle;
[0051] 2) Determine the real-time waypoint and heading angle where the UAV is located;
[0052] 3) According to the real-time waypoint and heading angle of the unmanned boat, and the trajectory unit of the unmanned boat movement, the reachable waypoint is obtained;
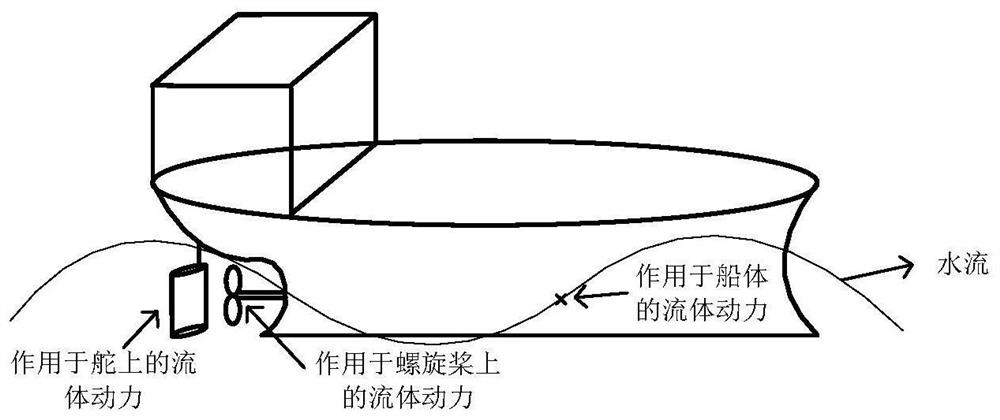
[0053] The generation method of the track unit is as follows:
[0054] 3.1) Use the MMG model to model the motion of the unman...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More