

A system and method for capturing the trajectory of an object with multiple cameras
A technology of object movement and multi-camera, applied in the field of remote video control, can solve problems such as difficulty in capturing motion trajectories at the same time, long time, incomplete tracking of object movement trajectories, etc., and achieve the effect of rich functions, convenient use, and timely motion capture
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] Below in conjunction with accompanying drawing, the present invention will be further described with specific embodiment, see Figure 1-Figure 17 :
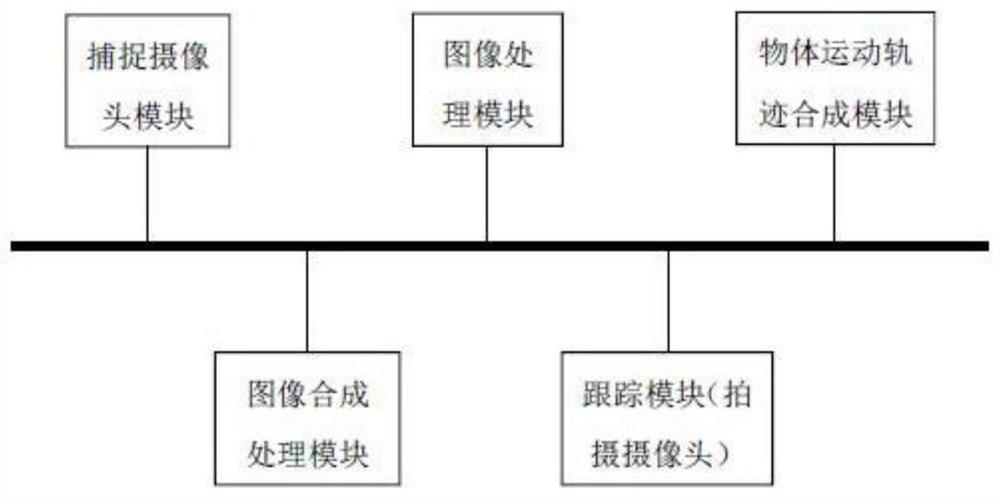
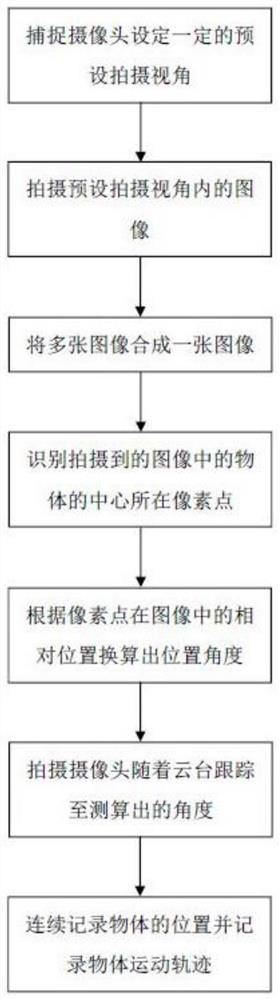
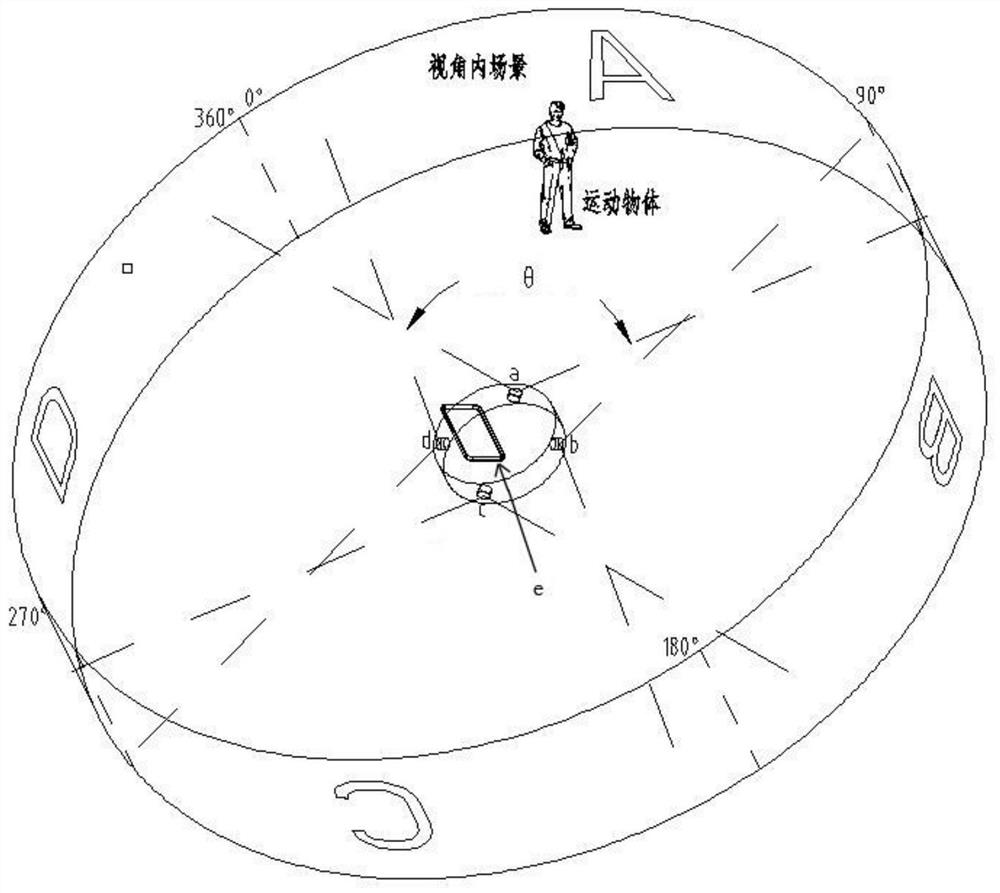
[0046] refer to image 3 , in a preferred embodiment of the present invention, an electronic pan / tilt system includes: a plurality of capture cameras, preferably four capture cameras, respectively a, b, c, d, four capture cameras surround the pan / tilt Module 1 is arranged on the outer periphery, and the four capture cameras are respectively set to a certain preset shooting angle of view θ, and the sum of all shooting angles of view is ≥360°; the cloud platform is equipped with a module 2 that can be flipped along the horizontal axis and the vertical axis. , the module two is provided with a shooting camera, and the shooting camera rotates horizontally or vertically under the drive of the module two; a control system is also provided in the cloud platform, which can analyze the object image collected by the capture camera ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More