

Gait planning method for biped robot based on deep reinforcement learning
A biped robot and reinforcement learning technology, applied in the gait planning field of biped robots based on deep reinforcement learning, can solve problems such as weak anti-interference ability and stiff gait, and achieve the elimination of geometric differences and noise, smooth walking, high The effect of control requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments.
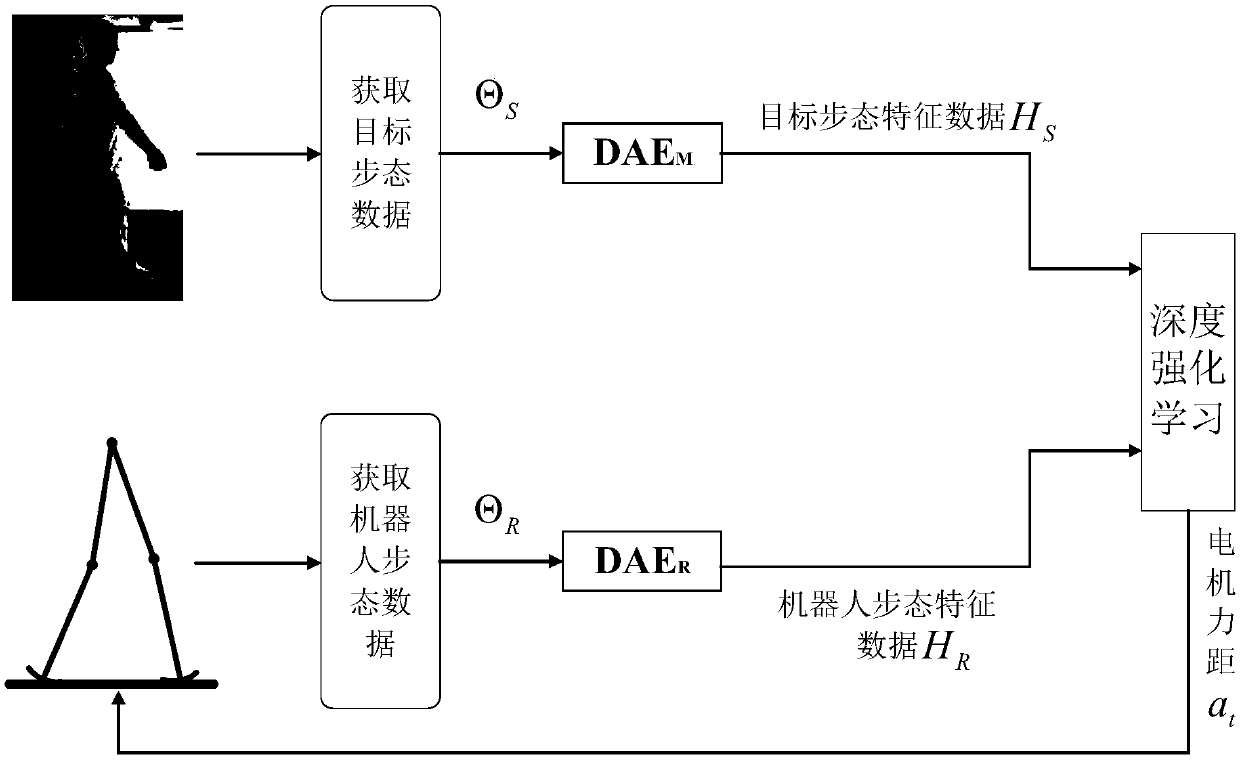
[0049] figure 1 is a schematic diagram of the planning method of the present invention; as figure 1 Shown, a kind of biped robot gait planning method based on deep reinforcement learning of the present invention comprises:
[0050] Step S1: Establish a biped robot model and describe the walking process of the robot; Step S1 specifically includes the following steps:
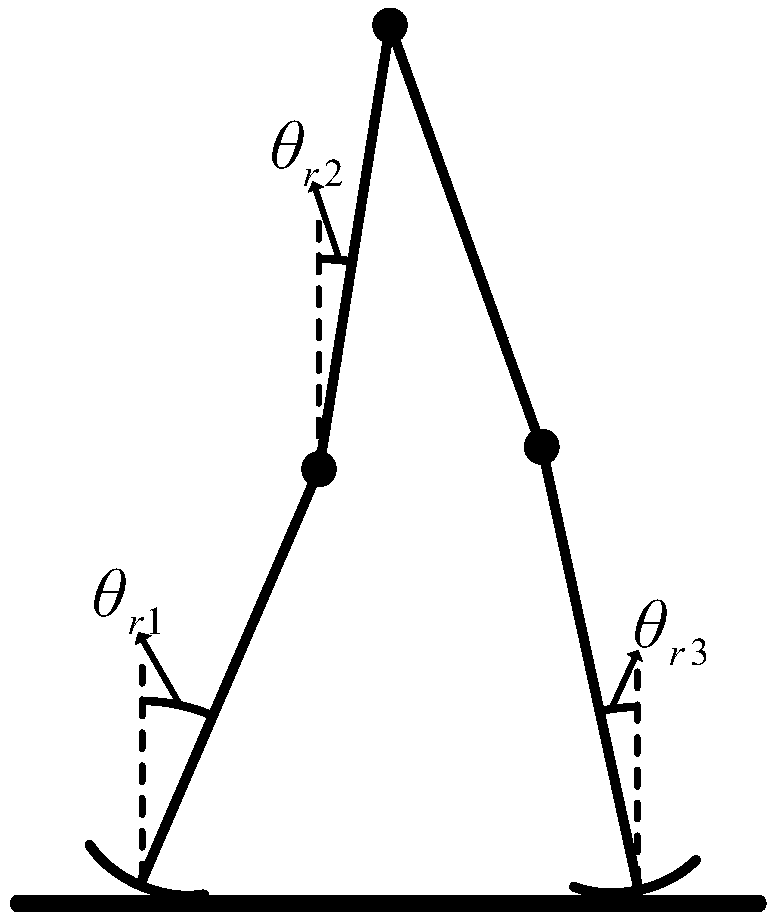
[0051] Step S101: Establish a 4-link robot model with knee arc feet;
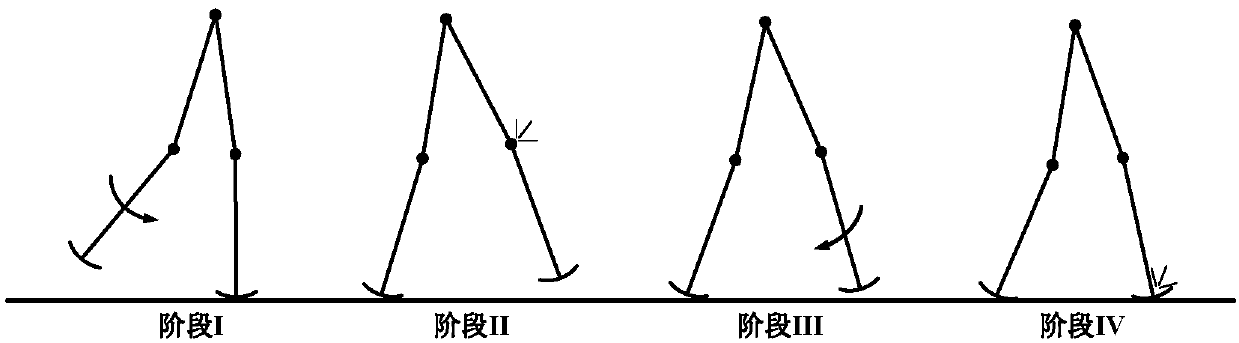
[0052] Step S102: Analyze the walking process of the model from the perspective of the right side of the robot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More