

Initialization Algorithm of Monocular Slam System Based on Unified Framework of Points and Lines
An initialization and point-and-line technology, applied in the field of computer vision, can solve problems such as poor scene adaptability of point feature algorithms, low system operation accuracy, and inability to make full use of information, so as to improve scene adaptability and avoid inherent problems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0056] In order to better understand the present invention, the technical solution of the present invention will be specifically described below through specific embodiments in conjunction with the accompanying drawings.
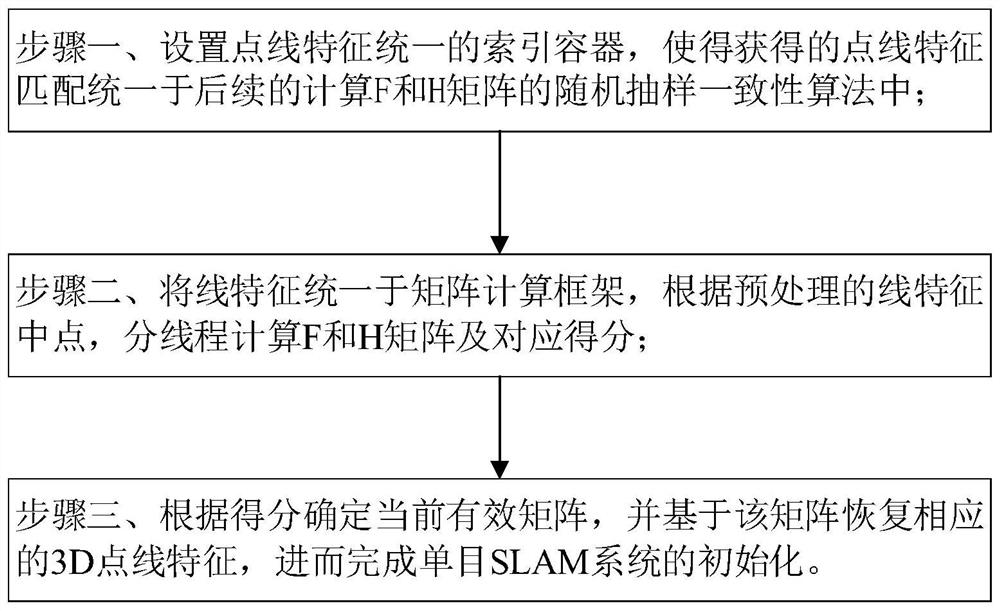
[0057] The applicable object of the present invention is the monocular SLAM system in visual SLAM, and the overall matching pairs of point features and line features are required to be at least more than 8 pairs before use. The present invention proposes a new algorithm that can unify the matching pairs of obtained point features and line features into the traditional initialization algorithm based on pure point features; finally, based on the PL-SLAM system example of the ORB-SLAM2 software framework extension, the method proposed by the present invention is verified. effectiveness. The implementation of this invention mainly comprises following three steps:
[0058] Step 1. Set an index container with unified point and line features
[0059] In order to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More