

Visual algorithm-based robot inspection point location intelligent configuration method
An intelligent configuration and robot technology, applied in the field of intelligent robots, can solve the problems of low efficiency and high cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments.
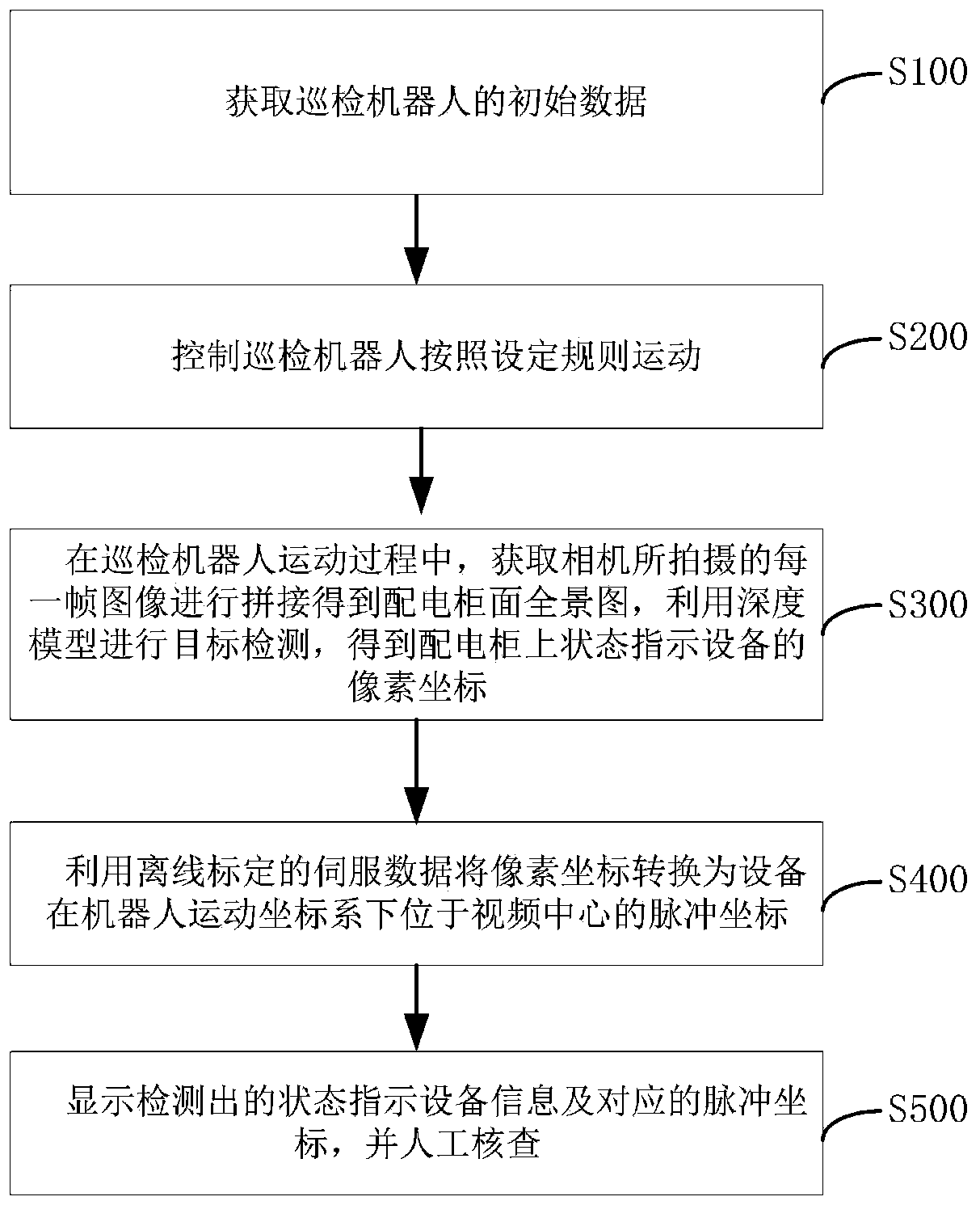
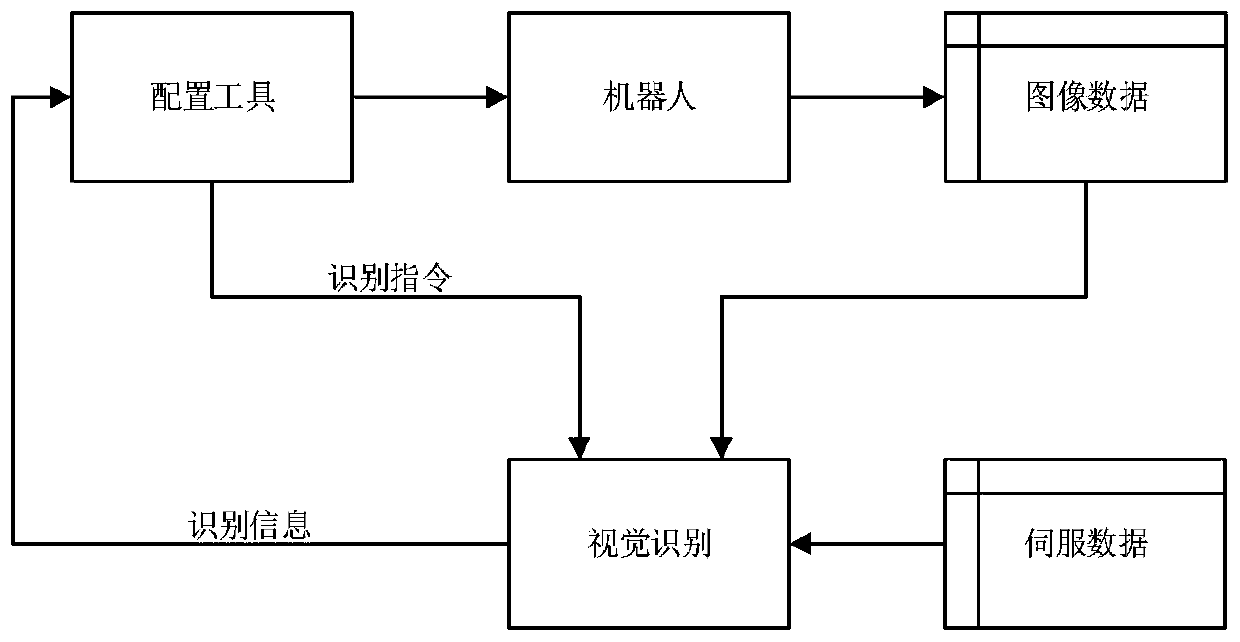
[0065] Such as figure 1 with figure 2 As shown, the vision algorithm-based intelligent configuration method for robot inspection points described in this embodiment is based on a rail-mounted inspection robot in a power distribution station, and a camera is set on the rail-mounted inspection robot in a distribution station;
[0066] Among them, the intelligent distribution steps of the rail-mounted inspection robot in the distribution station are as follows:
[0067] S100, acquiring initial data of the inspection robot;
[0068] S200. Control th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More