

Control method and device for robot
A control method and robot technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of low efficiency and high cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0018] According to an embodiment of the present invention, an embodiment of a robot control method is provided. It should be noted that the steps shown in the flow chart of the accompanying drawings can be executed in a computer system such as a set of computer-executable instructions, and, Although a logical order is shown in the flowcharts, in some cases the steps shown or described may be performed in an order different from that shown or described herein.
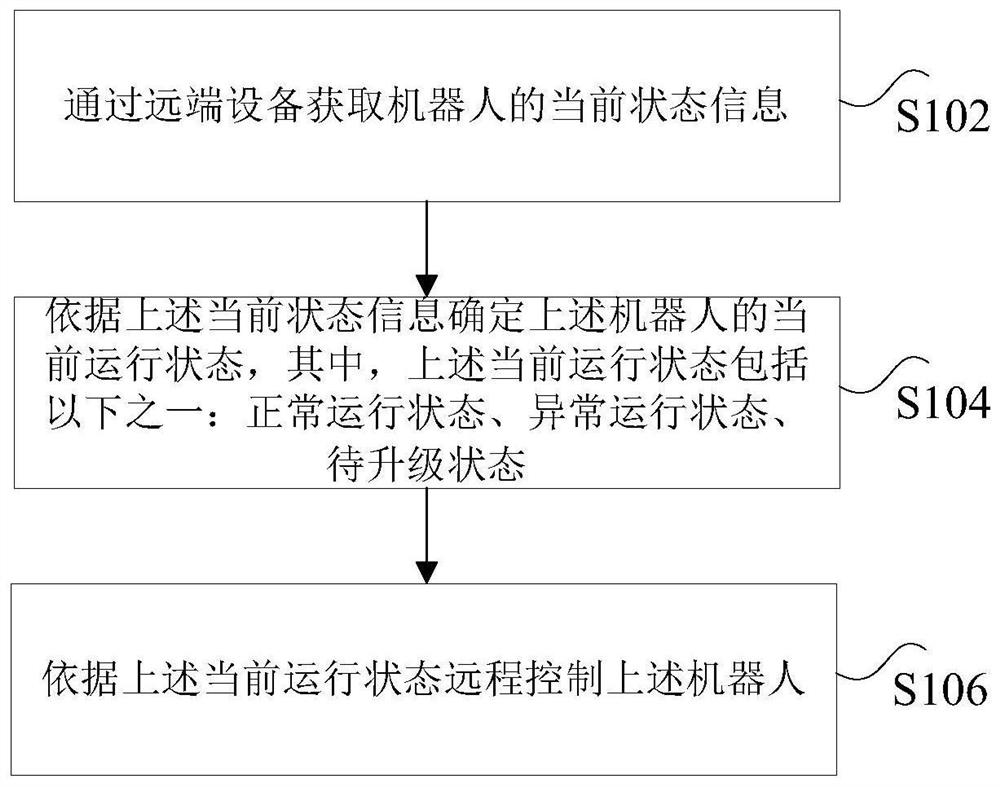
[0019] figure 1 is a flow chart of a robot control method according to an embodiment of the present invention, such as figure 1 As shown, the method includes the following steps:
[0020] Step S102, obtaining the current state information of the robot through the remote device;
[0021] Step S104, determining the current running state of the robot according to the current state information, wherein the current running state includes one of the following: normal running state, abnormal running state, and pending upgra...
Embodiment 2
[0050] According to an embodiment of the present invention, an embodiment of an apparatus for implementing the above robot control method is also provided, Figure 4 is a structural schematic diagram of a robot control device according to an embodiment of the present invention, such as Figure 4 As shown, the control device of the above-mentioned robot includes: an acquisition module 40, a determination module 42 and a control module 44, wherein:
[0051] The obtaining module 40 is used to obtain the current state information of the robot through the remote device; the determination module 42 is used to determine the current operating state of the above-mentioned robot according to the above-mentioned current state information, wherein the above-mentioned current operating state includes one of the following: normal operating state , an abnormal running state, and a state to be upgraded; the control module 44 is configured to remotely control the above-mentioned robot accordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More