

Prompting method and device, automatic driving vehicle and storage medium
A technology for autonomous driving and vehicles, which is applied in the fields of prompting methods, autonomous driving vehicles and storage media, and devices, and can solve problems such as poor safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0127] In order to make the purpose, technical solution and advantages of the present application clearer, the implementation manners of the present application will be further described in detail below in conjunction with the accompanying drawings.
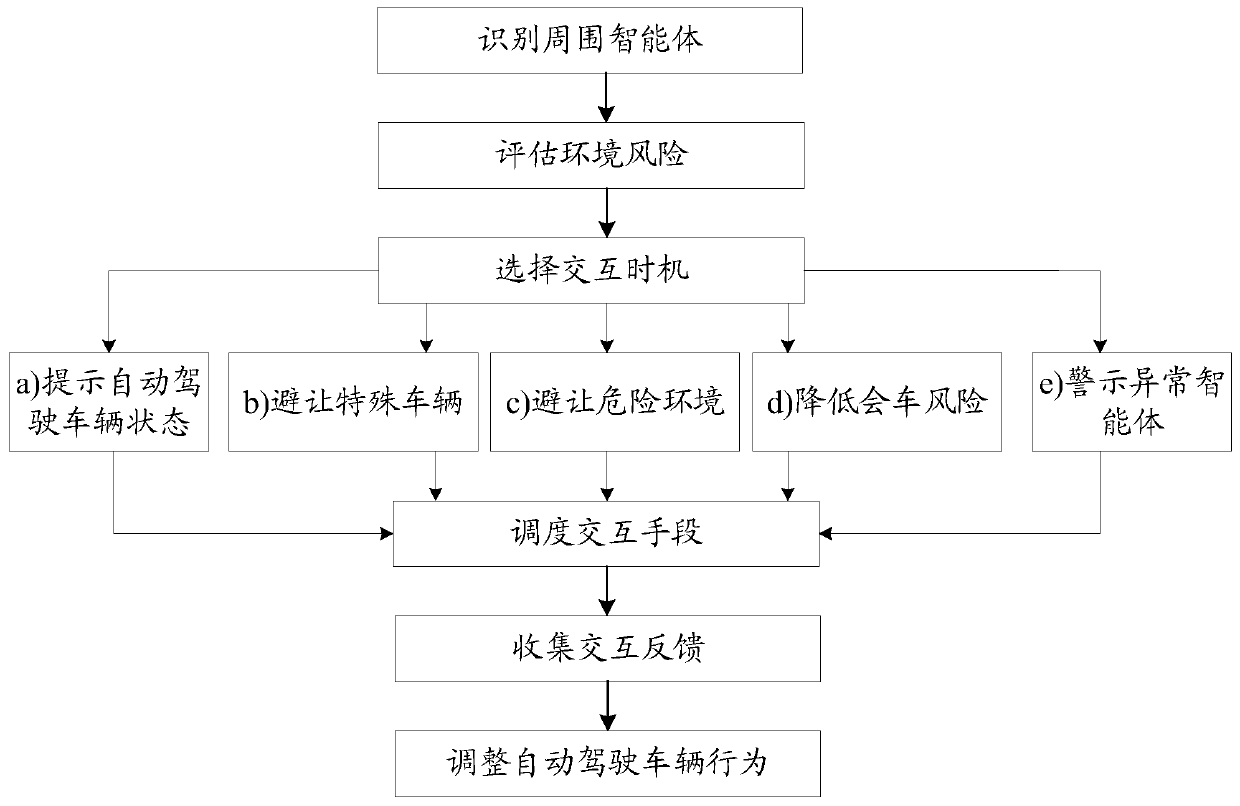
[0128] There are a large number of vehicles driving on the road, and the drivers of the vehicles have different personalities and behaviors, which lead to different driving operations performed by the vehicles. When an autonomous vehicle interacts with other vehicles, in addition to making reasonable decisions about its own driving operations, it must also clearly express its own intentions to avoid misjudgments by other vehicles on the autonomous vehicle. In addition, self-driving vehicles also need to remind other vehicles of abnormal driving operations in a timely manner, thereby reducing risk factors.
[0129] The current autonomous driving solution focuses on the decision-making, planning and control of the internal driving ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More