

A trajectory tracking control method for surface unmanned vehicle under asymmetric time-varying full-state constraints with time-delay
A control method and trajectory tracking technology, applied in the field of control, can solve problems such as not considering time-delay constraints and poor control effects, and achieve the effects of improving control effects, good trajectory tracking control effects, and solving time-delay constraints
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0072] This embodiment is a method for tracking and controlling the trajectory of an unmanned surface vehicle under the constraint of time-delay asymmetric time-varying full state, including the following steps:
[0073] 1. Establish a closed-loop system for surface unmanned vehicles:
[0074] A 3-degree-of-freedom surface unmanned vehicle dynamics model with multiple inputs and multiple outputs is expressed as follows:
[0075]
[0076] in, Including the position in the geodetic coordinate system (η x , η y ) and heading angle (η ψ ). Including surge velocity v x , the swaying speed v y , Yaw speed v ψ . is a symmetric positive definite inertial matrix, represents centripetal force and Coriolis torque, is the damping matrix, g(η) represents the restoring force caused by gravity, ocean current and buoyancy, and w is the external disturbance. J(η) is a non-singular transformation matrix, the non-singular transformation matrix J(η) from satellite coordinate sy...
Embodiment
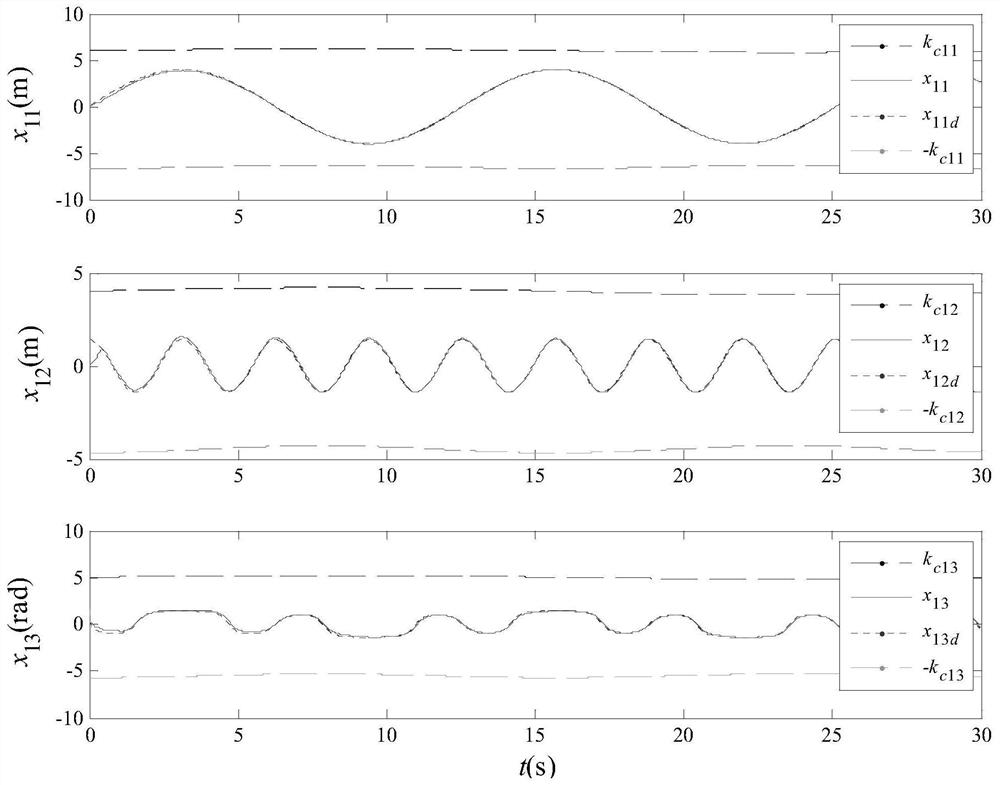
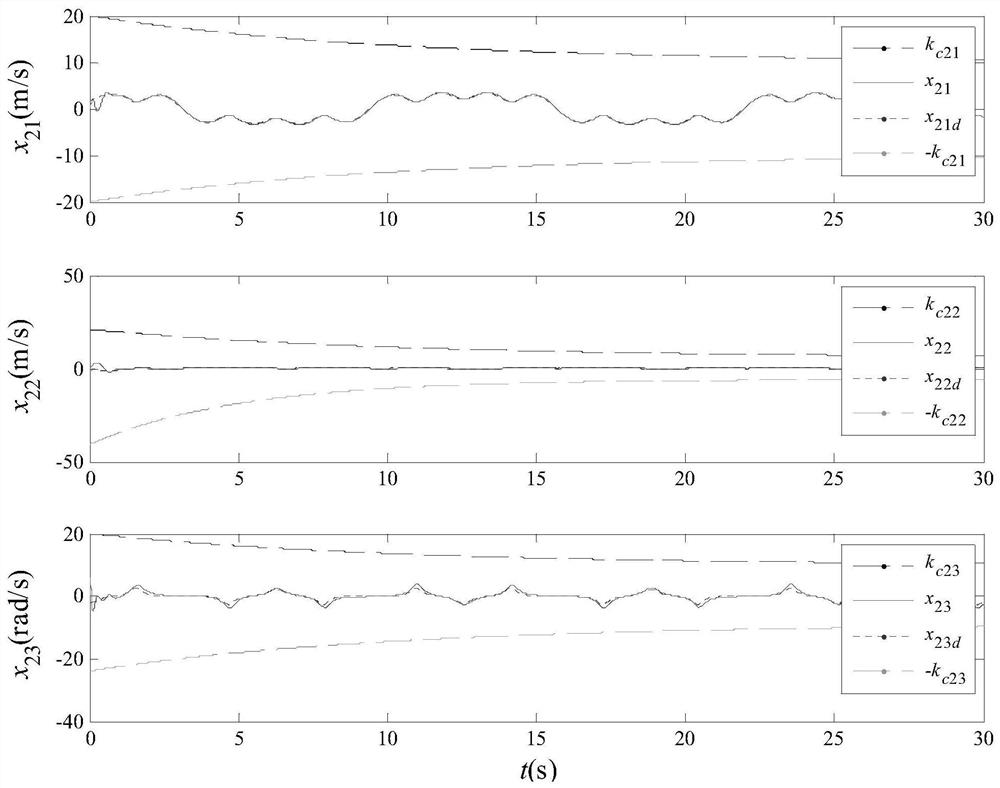
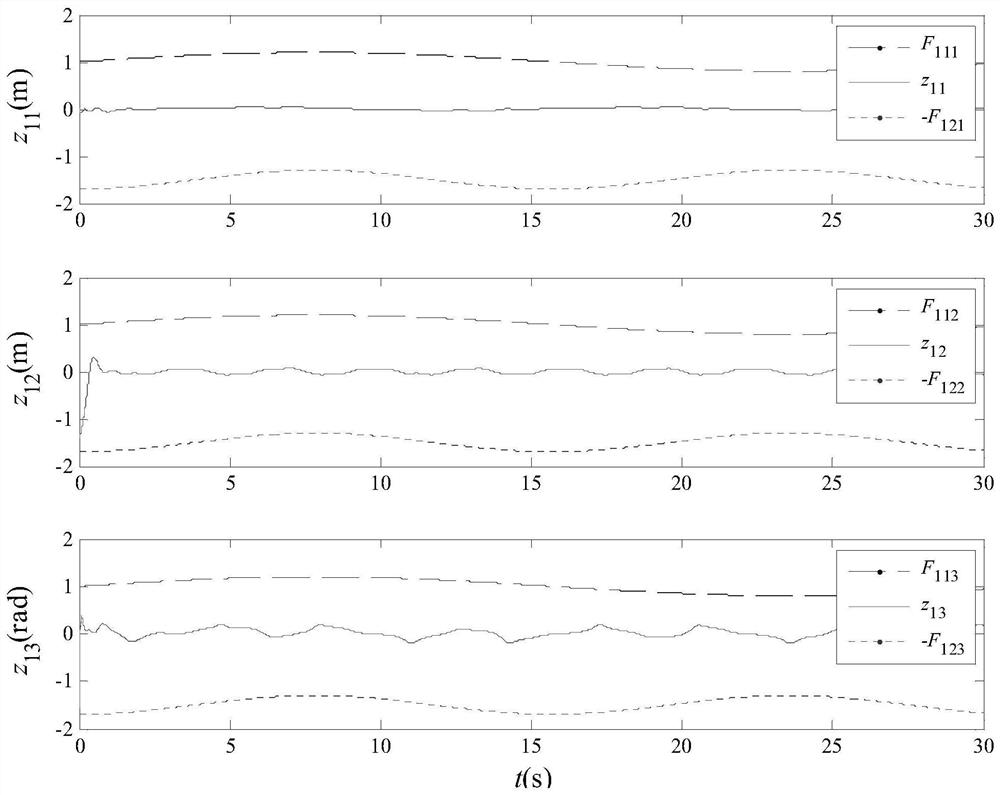
[0272] In order to verify the effectiveness of the semi-globally uniformly bounded control method and the finite-time control method proposed by the present invention, simulations are carried out using the scheme of the first embodiment.
[0273] The present invention uses the model ship Cybership II, a 1:70 replica of a survey ship built by the Norwegian University of Science and Technology's Ocean Control Laboratory.
[0274] The desired trajectory chosen is as follows:
[0275] x 1d (t)=[x 1xd (t),x 1yd (t),x 1ψd (t)] T
[0276]
[0277]
[0278] External disturbances are assumed as follows:
[0279] w(t)=[w 1 (t),w 2 (t),w 3 (t)] T
[0280]
[0281] The symmetric positive definite inertia matrix M, centripetal force and Coriolis force torque C(ν), and damping matrix D(ν) are as follows:
[0282]
[0283]
[0284]
[0285] Corresponding hydrodynamic parameter among the present invention is as follows: m=23.8, I z =1.76,x g =0.046,X u =-0.722...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More