

Agricultural and mining articulated vehicle path tracking control method
A vehicle path and tracking control technology, applied in general control systems, adaptive control, control/adjustment systems, etc., can solve problems such as frame damage and difficult handling, achieve stable heading angle, suppress vehicle body shake, and reduce iterations Calculate the effect of time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
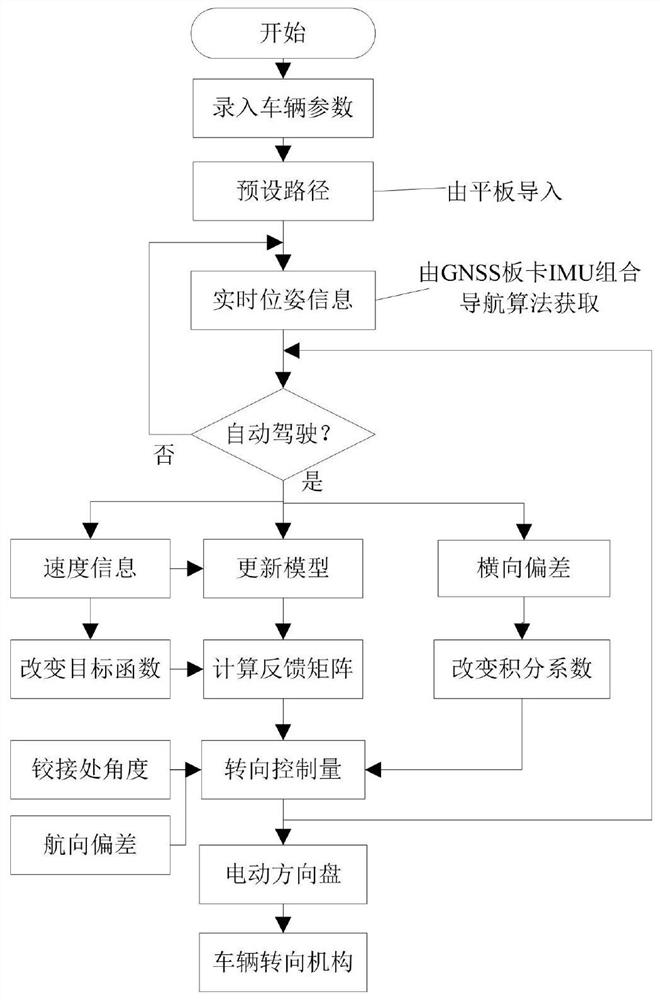
[0047] refer to Figure 3-Figure 4 As shown, a path following control method for agricultural and mining articulated vehicles comprises the following steps:
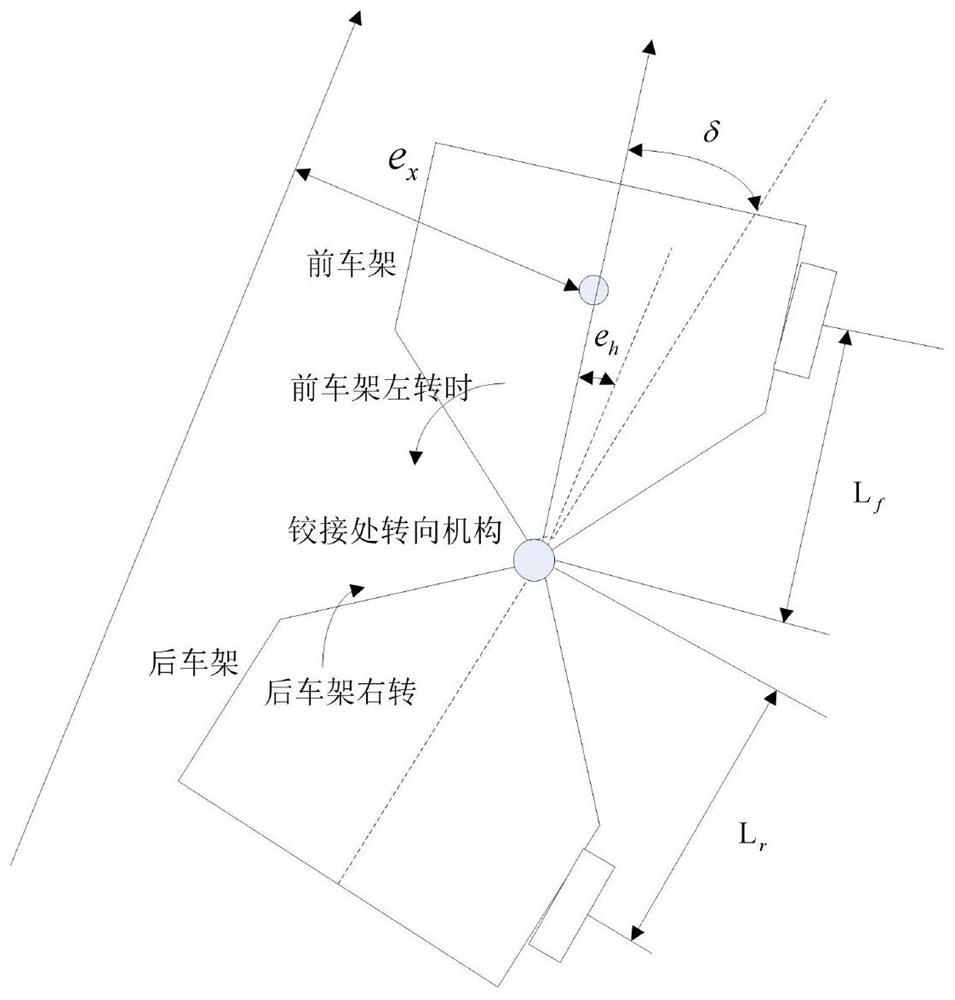
[0048] In the first step, enter the parameters of the articulated vehicle, including the distance from the center of the front wheel to the hinge, the distance from the center of the rear wheel to the hinge, and the distance from the GNSS antenna to the center of the wheel.
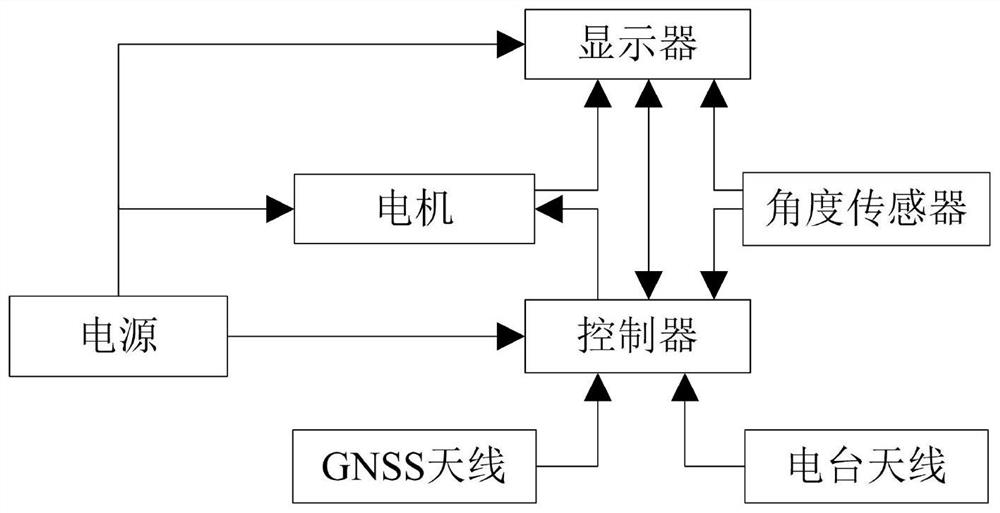
[0049] In the second step, the program starts to obtain the scheduled driving trajectory sent by the tablet to the controller. The controller performs RTK calculation based on the differential signal of the base station obtained by the GNSS board to obtain the real-time position information of the vehicle. Estimation and pose correction to obtain accurate pose information.
[0050] The third step is to calculate the lateral deviation and speed information between the vehicle and the predetermined path according to the predetermined driving trajecto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More