

An autonomous landing method for UAV ships based on relatively precise single-point positioning
A precise single-point positioning and autonomous landing technology, which is applied in vehicle position/route/height control, instruments, control/adjustment systems, etc., can solve the problems of low relative position measurement accuracy and instability, and achieve relative position measurement accuracy Low and unstable, improve relative positioning accuracy, good military and civilian value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] In order to make those skilled in the art better understand the technical solutions of the present invention, the present invention will be further described in detail below with reference to specific embodiments.
[0062] The embodiments of the present invention provide a UAV landing method based on relatively precise single-point positioning, which solves the problem of low and unstable relative position measurement accuracy between UAVs and ships in a complex meteorological environment. To ensure that the UAV can effectively deal with the complex environment in the process of autonomous landing, and achieve safe and autonomous landing.
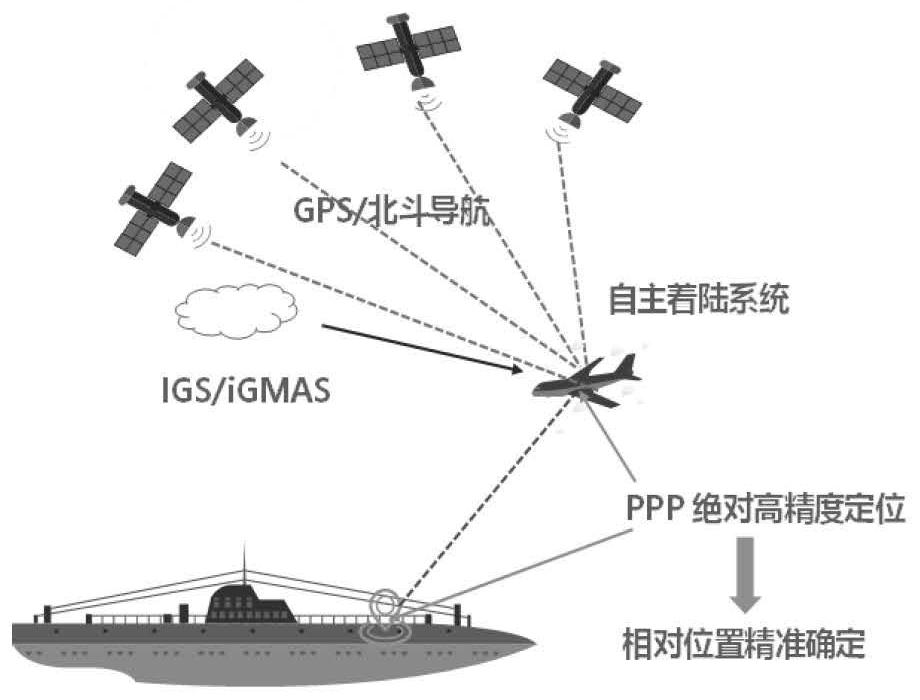
[0063] This embodiment provides an autonomous landing method for UAV ships based on relatively precise single-point positioning, and the carried system is composed of UAVs, ships, GPS / Beidou navigation, and IGS / IGMAS. figure 1 shown.
[0064] An autonomous landing method for UAV ships based on relatively precise single-point positio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More