

All fours type bionic robot control device
A bionic robot and control device technology, applied in the directions of digital control, attitude control, electrical program control, etc., can solve the problem that a quadruped robot cannot adjust its own motion autonomously, and achieve the effect of intelligent enhancement of adaptive navigation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
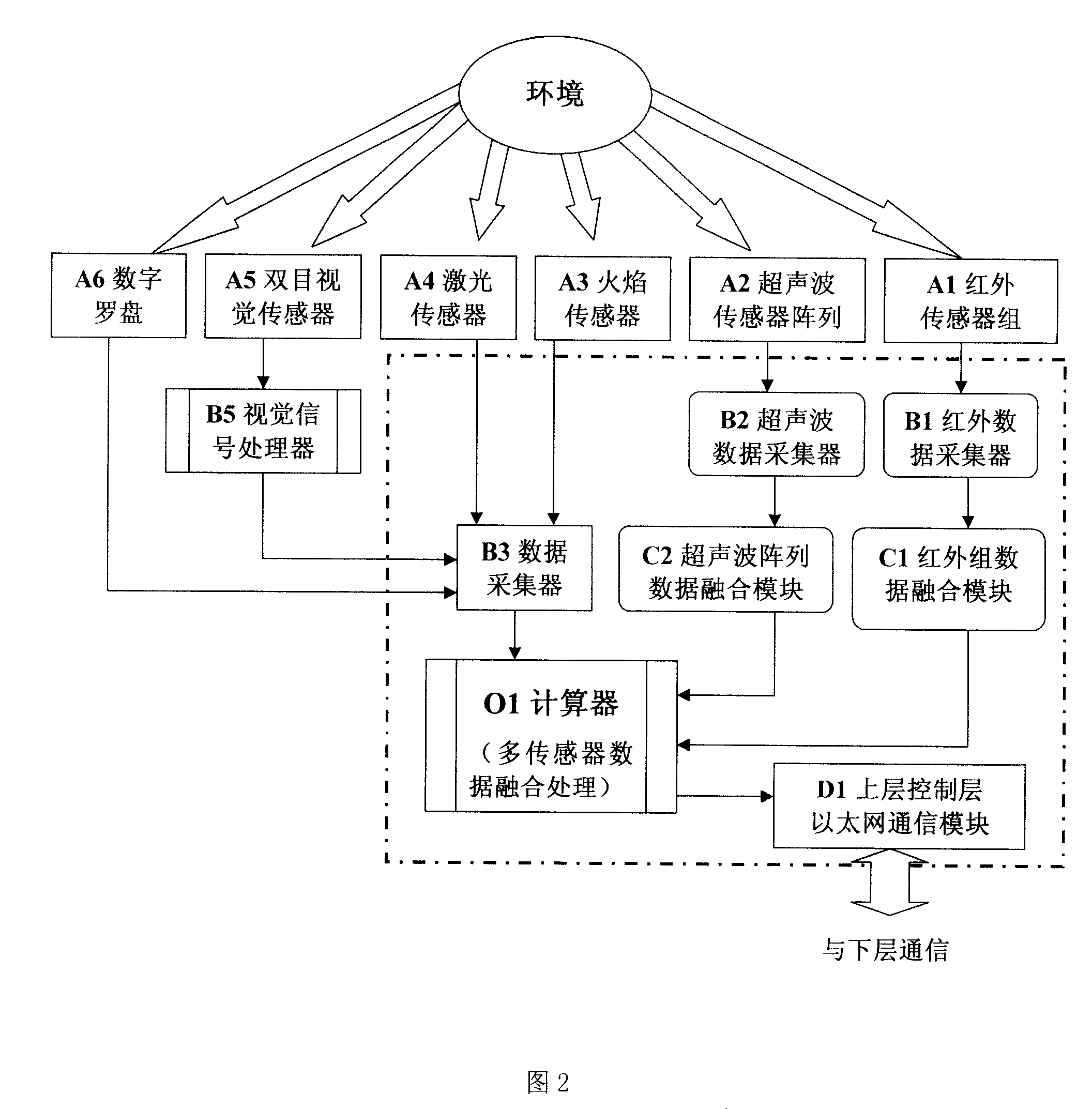
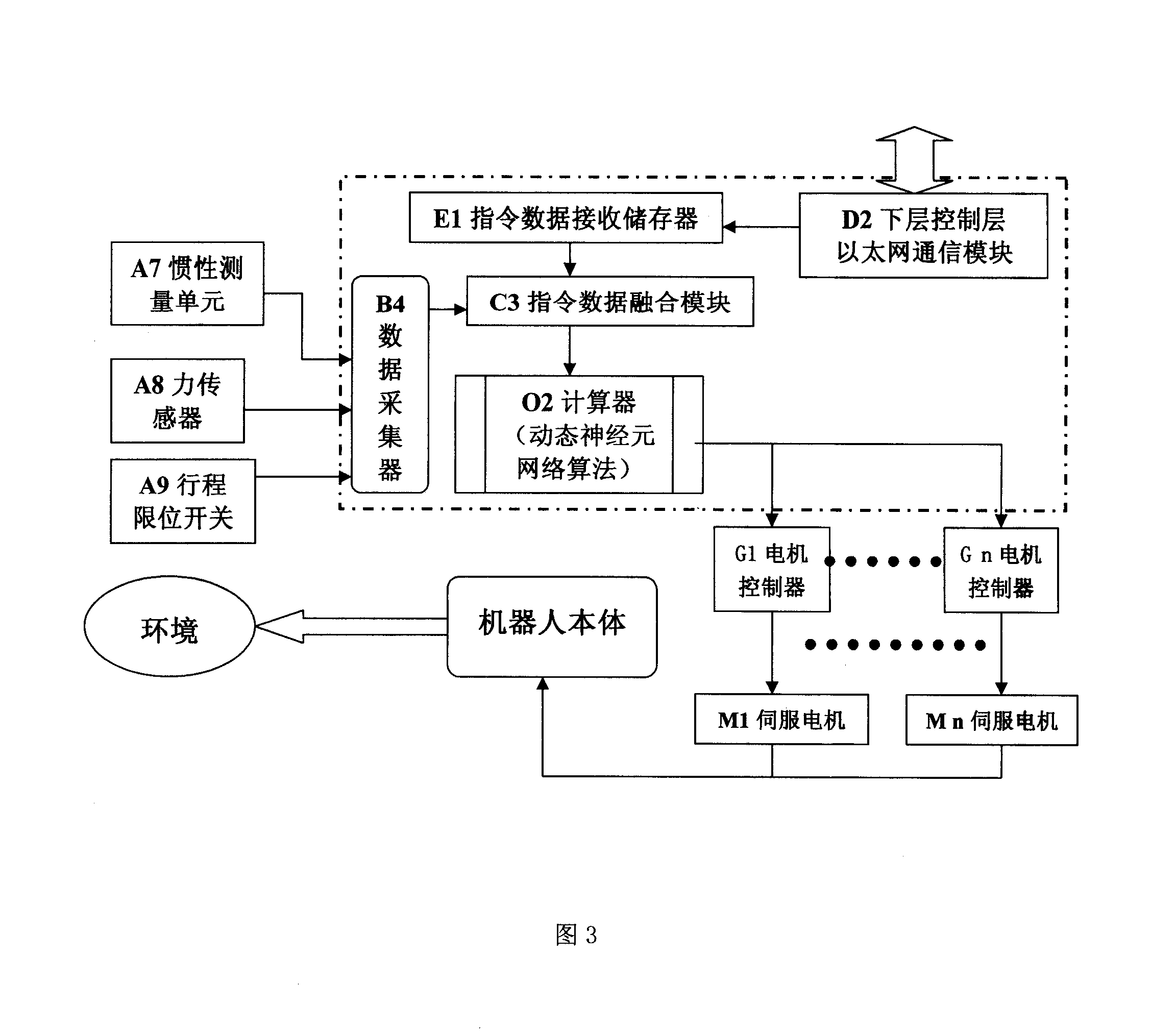
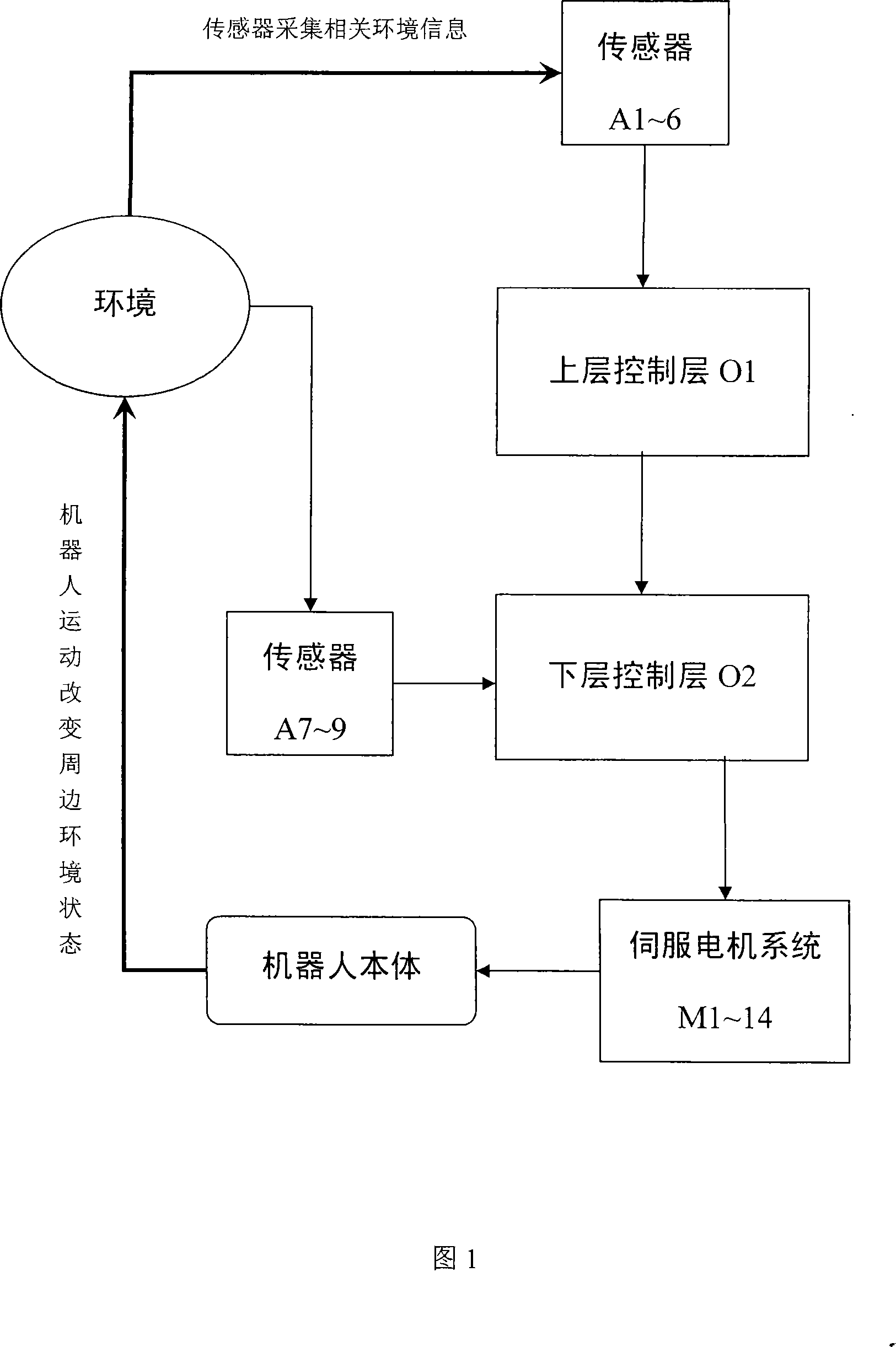
[0013] Device embodiment: As shown in Fig. 1, it is the robot control device scheme according to the present invention. The neural control system of most organisms including human beings all occurs in a biological mode, which is divided into decision-making with the upper brain as the core. The control layer and the lower central nervous system are the coordination execution layer with the core. Among them, the brain is used to calculate and process the environmental data collected by various organs and make judgments, that is, to obtain useful information, and to convey information generation instructions to the central nervous system. The central nervous system is used to issue execution instructions and control the movement of limbs (including bones, muscles, etc.). This mode is the dynamic neuron network mode of the upper and lower control layers used in the present invention.
[0014] Similar to the biological motion control system, the quadruped bionic robot moving in th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More