

Vertical follow-up type lightened walking rehabilitation training robot
A technology of rehabilitation training and robotics, applied in the direction of passive exercise equipment, sports accessories, gymnastics equipment, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
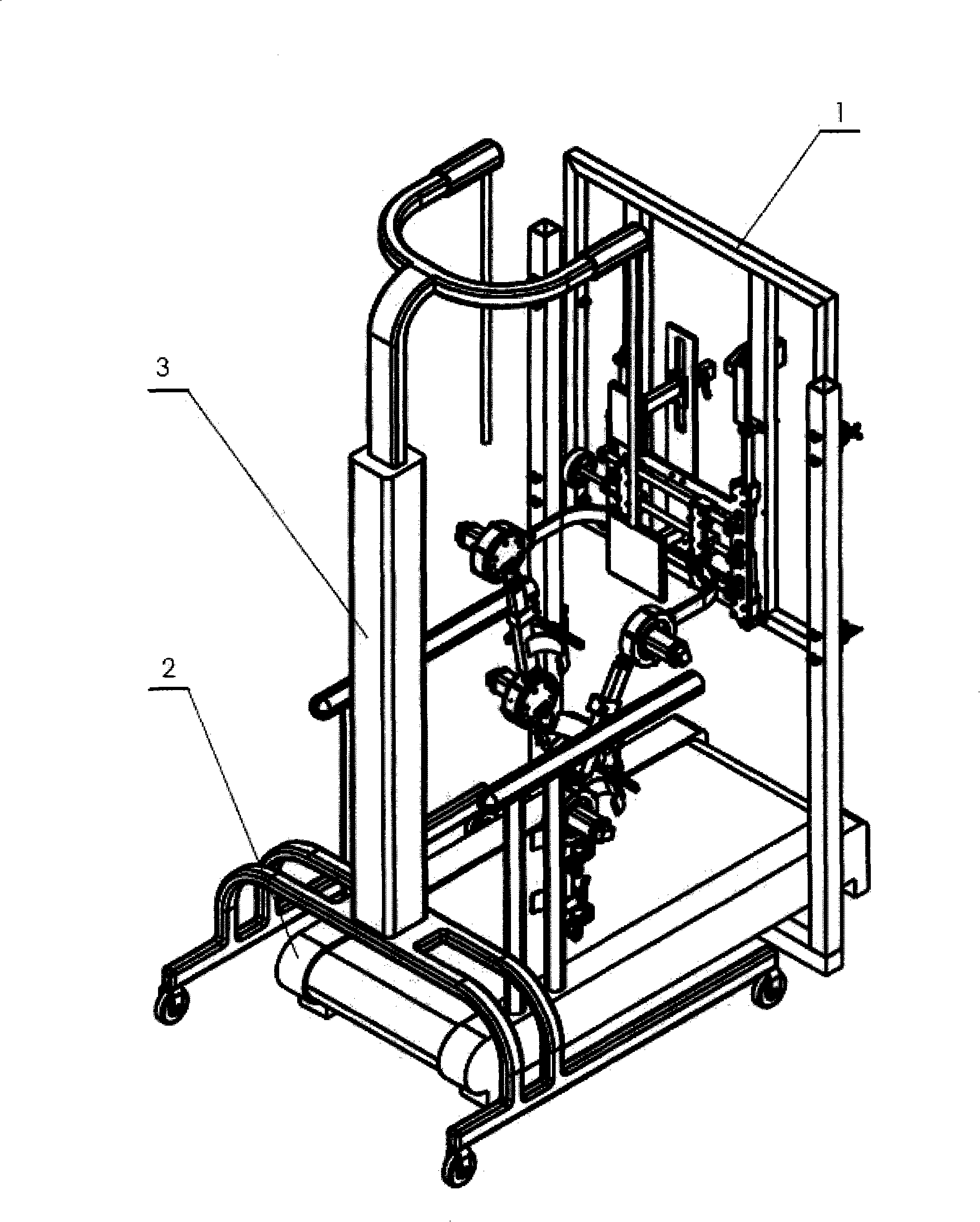
[0028] The core idea of the present invention is to use a gantry vertical lifting mechanism as the follow-up support of the exoskeleton mechanical legs, so that during the walking training process, the exoskeleton mechanical legs can fluctuate up and down synchronously with the ups and downs of the user's center of gravity, avoiding It eliminates the shortage of serial movement in the front and back direction that usually adopts the parallel four-bar mechanism as the lifting mechanism.
[0029] refer to figure 1 As shown, the robot device for weight loss walking rehabilitation training of the present invention is mainly composed of an exoskeleton mechanical leg and its ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More