

Any eulerian angle step length orthogonal series approximation output method based on angular speed
A technology of orthogonal series and output method, which is applied in the direction of integrated navigator, etc., and can solve the problem of poor output accuracy of Euler angles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
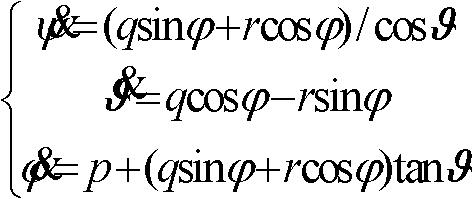
[0054] 1. (a) According to the rigid body attitude equation (Euler equation):
[0055]
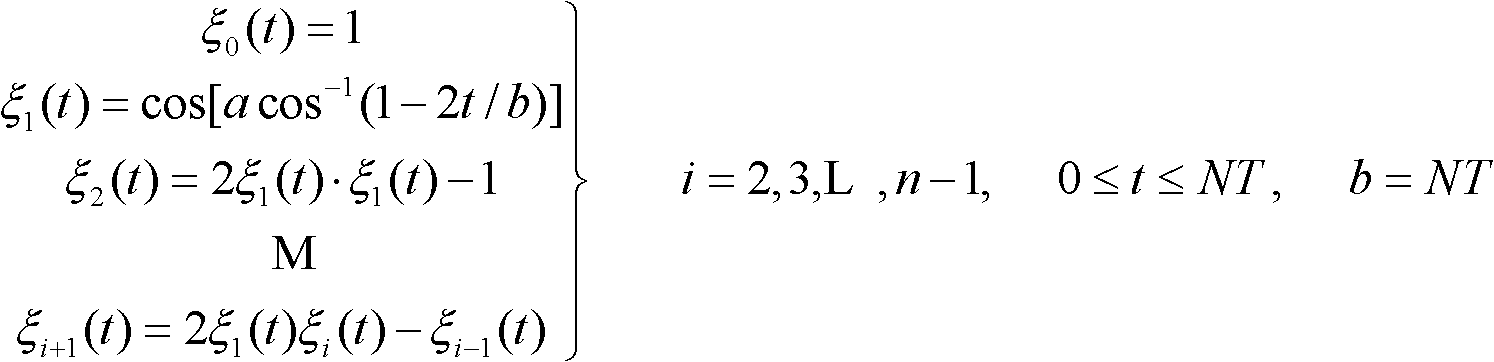
[0056] in: They refer to the roll, pitch, and yaw angles respectively; p, q, and r are the roll, pitch, and yaw angular velocities respectively; the definitions of the parameters throughout the text are the same; the calculation of these three Euler angles is to solve the pitch angle, roll angle, and yaw angle in sequence The steps of the flight angle are carried out; the n-order expansions of the roll, pitch, and yaw angular velocities p, q, and r are respectively
[0057] p(t)=[p 0 p 1 L p n-1 p n ][ξ 0 (t) ξ 1 (t) L ξ n-1 (t) ξ n (t)] T
[0058] q(t)=[q 0 q 1 Q n-1 q n ][ξ 0 (t) ξ 1 (t) L ξ n-1 (t) ξ n (t)] T
[0059] r(t)=[r 0 r 1 L r n-1 r n ][ξ 0 (t) ξ 1 (t) L ξ n-1 (t) ξ n (t)] T
[0060] in
[0061] ξ 0 ( ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More