

Euler angle polynomial class-index approximate output method on basis of angle velocity
An output method, polynomial technology, applied in the direction of integrated navigator, etc., can solve the problem of poor output accuracy of Euler angles, and achieve the effect of ensuring the accuracy of time update iterative calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
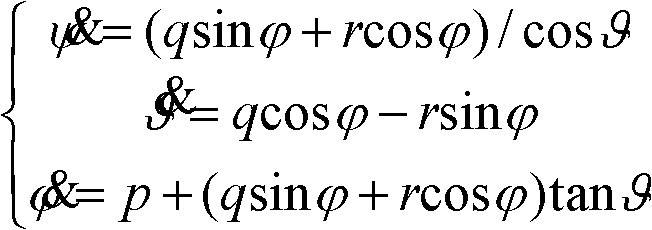
[0040] 1. (a) According to the rigid body attitude equation (Euler equation):
[0041]
[0042] in: ψ refers to the roll, pitch, and yaw angles; p, q, and r are the roll, pitch, and yaw angular velocities respectively; the definitions of the parameters throughout the text are the same; the calculation of these three Euler angles is to solve the pitch angle, roll angle, and The steps of the yaw angle are carried out; the expansion expressions of the roll, pitch, and yaw angular velocities p, q, and r are respectively
[0043] p(t)=pMξ, q(t)=qMξ, r(t)=rMξ
[0044] in
[0045] p=[p 0 p 1 L p n-1 p n ]q=[q 0 q 1 Q n-1 q n ]
[0046] r = [r 0 r 1 L r n-1 r n ]ξ=[1 t L t n-1 t n ] T
[0047] M is a constant matrix defined in advance, and T is defined as the sampling period;
[0048] For Chebyshev (Chebyshev) orthogonal polynomials:
[0049] ξ 0 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More