

Genetic algorithm-based calibration method for inertial/geomagnetic sensors
A geomagnetic sensor and calibration method technology, applied in the field of three-dimensional attitude tracking, can solve the problem of not giving a method for aligning the coordinate system of a three-axis micro-acceleration sensor, not giving a calibration method for a magnetic sensor and a gyroscope sensor, random sampling data, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
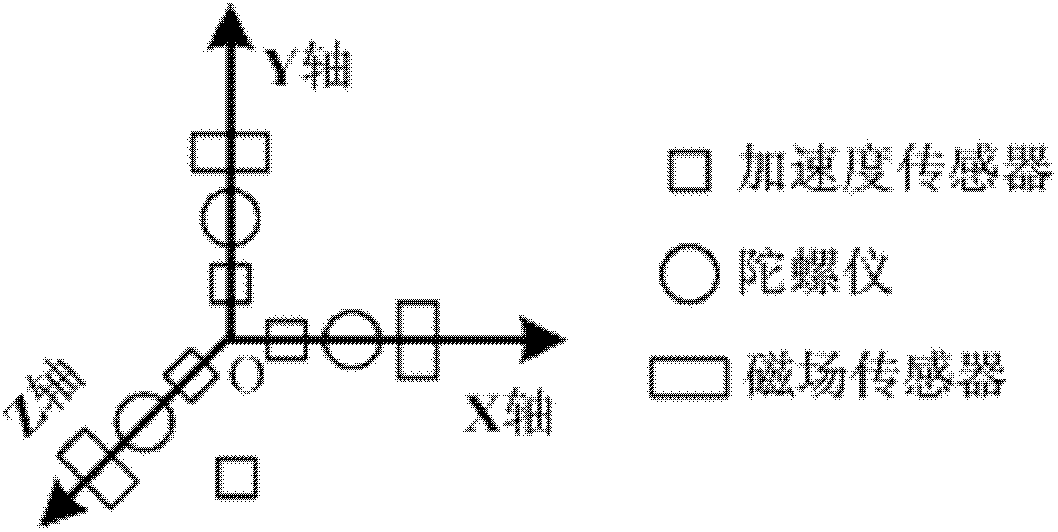
[0021] figure 1 The composition of the pose tracking unit for calibration in the present invention is shown. The attitude tracking unit integrates a three-axis acceleration sensor, a three-axis micro-gyroscope sensor and a three-axis magnetic sensor. The orthogonal axes on which the three sets of sensors are located constitute the three-axis coordinate system of the unit's X-axis, Y-axis and Z-axis.
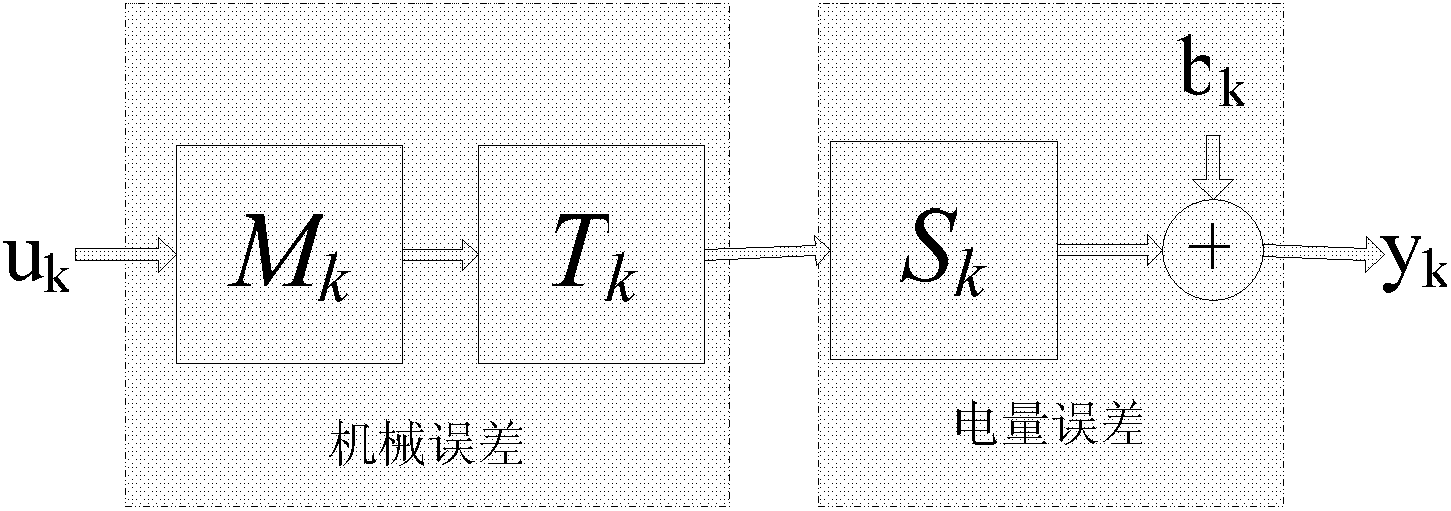
[0022] figure 2 A classical three-axis sensor error model is shown. The output of the three-axis MEMS sensor is the vector y k , the actual sensor input data is u k , where k represents the type of sensor, k={a, m, g}, a, m, and g respectively represent a three-axis acceleration sensor, a three-axis geomagnetic sensor,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More