

Matching navigation method based on local gravity field approximation
A navigation method, a gravity field technology, applied in the field of inertial navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] The present invention will be further described in detail below in conjunction with the drawings and specific embodiments:
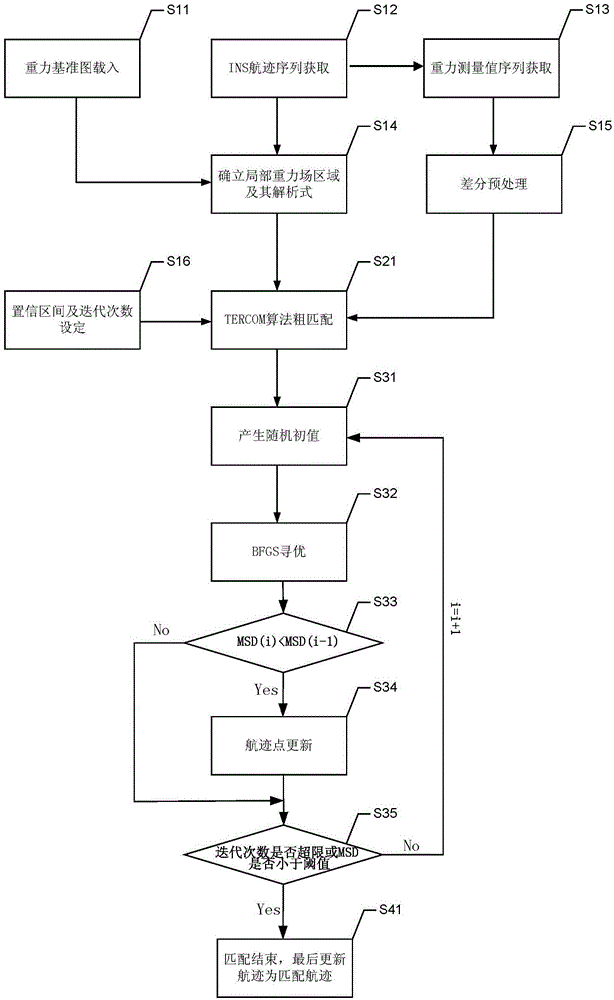
[0044] Such as figure 1 The matching navigation method based on local gravity field approximation includes the following steps:
[0045] Step S11: Load the prepared gravity anomaly reference map into the matching navigation system in advance, where the gravity anomaly reference map is a gridded data collection of gravity anomalies;
[0046] Step S12: Obtain the position of the track point indicated by the inertial navigation system within a period of time through the inertial navigation system as the matching initial track;
[0047] Step S13: Obtain the gravity measurement value sequence corresponding to the track point indicated by the inertial navigation system in step S12 through the gravimeter measurement system;
[0048] Step S14: According to the inertial navigation system indicated track and its confidence interval in step 12, intercept a local grid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More