

Matching navigation method based on local gravity field approximation
A navigation method, a gravity field technology, applied in the field of inertial navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] Below in conjunction with the accompanying drawings and specific embodiments, the present invention will be described in further detail:
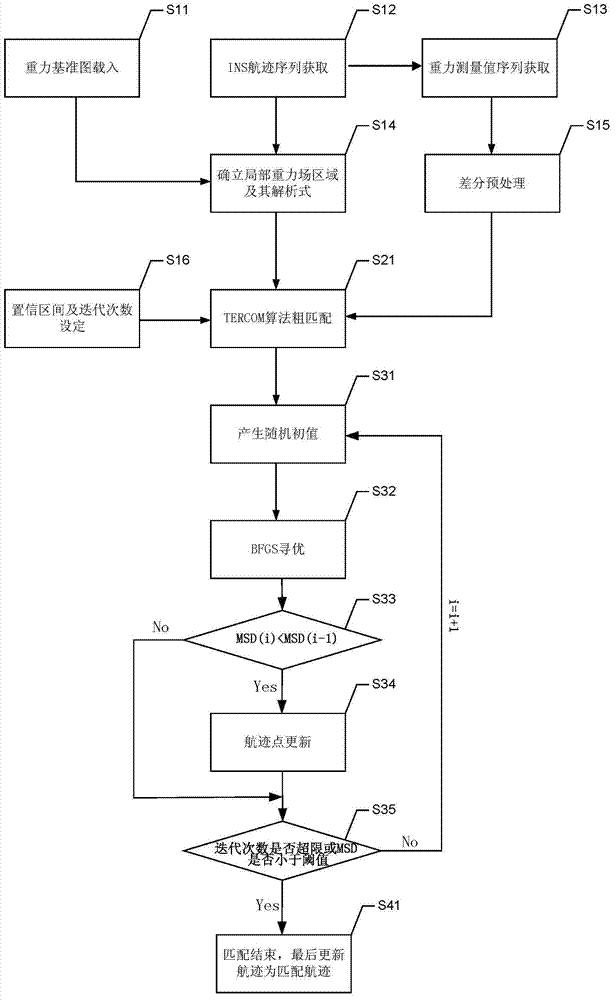
[0044] like figure 1 The described matching navigation method based on local gravity field approximation includes the following steps:
[0045] Step S11: Load the prepared gravity abnormal value reference map into the matching navigation system in advance, and the gravity abnormal value reference map is a gridded gravity abnormal value data set;
[0046] Step S12: obtain the inertial navigation system indication track point position within a period of time by the inertial navigation system as the matching initial track;
[0047] Step S13: obtain the gravity measurement value sequence corresponding to the track point indicated by the inertial navigation system in step S12 through the gravimeter measurement system;
[0048] Step S14: According to the indicated track and confidence interval of the inertial navigation system in step 12, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More