

Robot dexterous hand curved-surface tracking method based on pressure sensor array
A pressure sensor and robot technology, applied in manipulators, manufacturing tools, etc., can solve problems such as poor versatility, limited perception ability, and fine operation of operating objects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0011] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
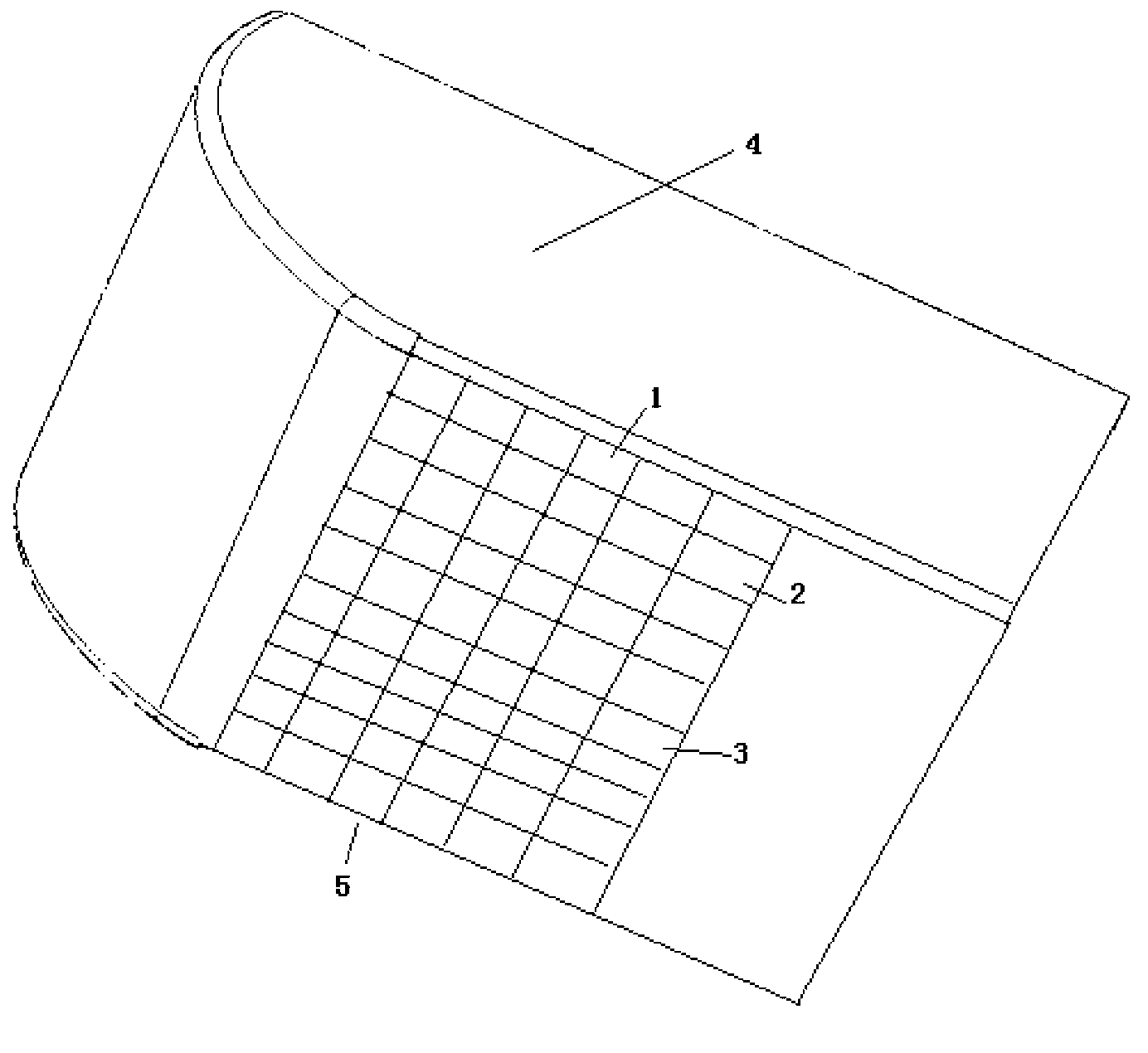
[0012] The robot dexterous hand curved surface tracking method based on the pressure sensor array proposed by the present invention includes: step 1: installing a pressure sensor array 5 on the robot dexterous hand 4; The size of the positive pressure; Step 3: Select three pressure sensors whose positive pressure is not zero and not on the same straight line; Step 4: Adjust the position of the sensor array according to the difference of the positive pressure on the three pressure sensors described in Step 3 The included angle between the plane and the curved surface contacted by the robot dexterous hand until the positive pressures on the three pressure sensors are equal; Step 5: Adjust the same positive pressure on the three pressure sensors in step 4 to a specified value. In step 3, there may be 4 or more pressure sensors that are not on ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More