

Surface tracking method for robotic dexterous hand based on pressure sensor array
A pressure sensor and dexterous hand technology, which is applied in the field of surface tracking of robot dexterous hands based on pressure sensor arrays, can solve the problems of fine manipulation of objects, poor versatility, limited perception ability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0010] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
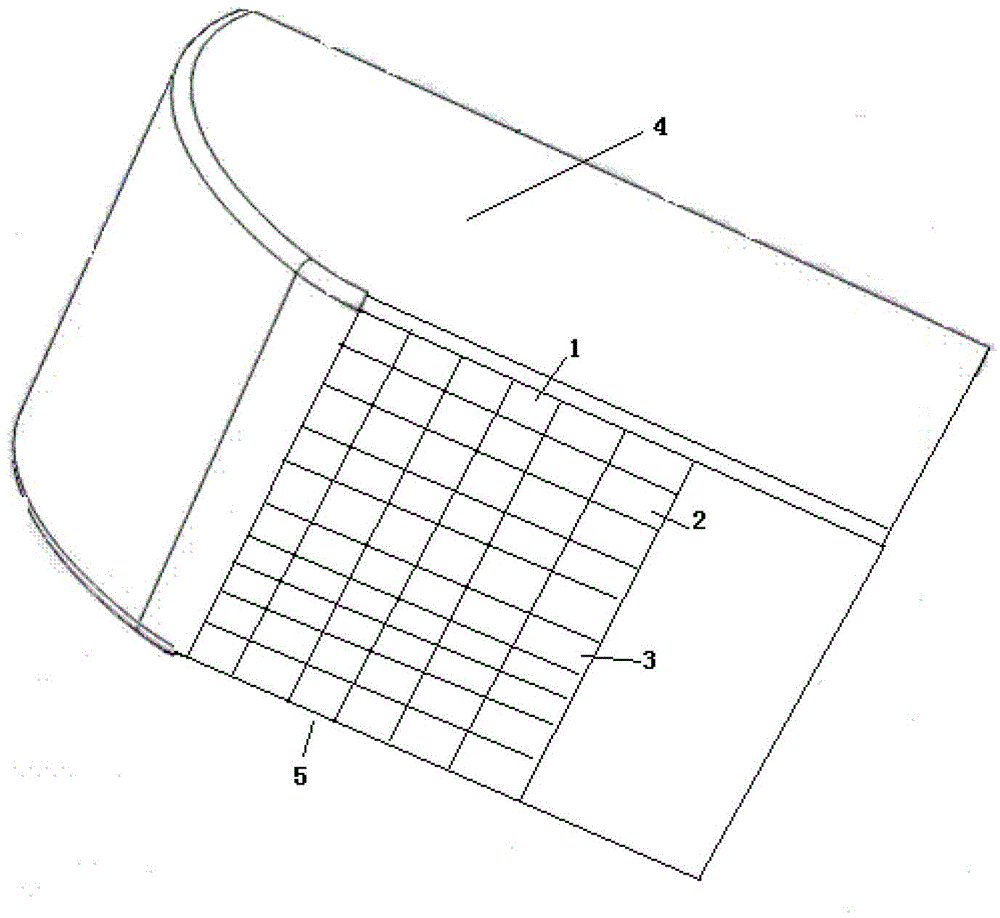
[0011] The robot dexterous hand curved surface tracking method based on the pressure sensor array proposed by the present invention includes: step 1: installing a pressure sensor array 5 on the robot dexterous hand 4; The size of the positive pressure; Step 3: Select three pressure sensors whose positive pressure is not zero and not on the same straight line; Step 4: Adjust the position of the sensor array according to the difference of the positive pressure on the three pressure sensors described in Step 3 The included angle between the plane and the curved surface contacted by the robot dexterous hand until the positive pressures on the three pressure sensors are equal; Step 5: Adjust the same positive pressure on the three pressure sensors in step 4 to a specified value. In step 3, there may be 4 or more pressure sensors that are not on ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More