

A method for creating cascaded maps for mobile robots based on hybrid features
A mobile robot, mixed feature technology, applied in the directions of maps/plans/charts, instruments, image enhancement, etc., can solve the problem that the robot cannot provide room information, and achieve the effect of preventing association failure, enriching room information, and improving position accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described in detail below in conjunction with the accompanying drawings.
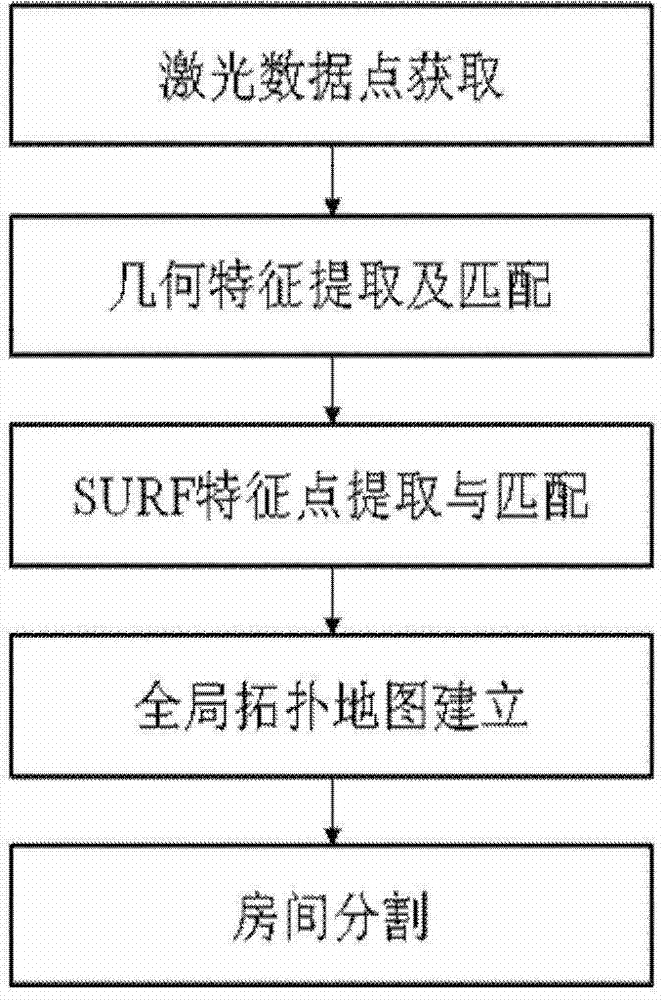
[0036] The main flowchart of the method of the present invention is attached figure 1 shown, including the following steps:
[0037] Step 1: Obtain laser data points, the specific method is as follows:
[0038] The measuring range of the laser sensor is 20-4000mm; Angle resolution: 0.36°; Scanning time: 100ms. It is characterized by high precision, high resolution and wide measurement range.
[0039] The principle of laser sensor data collection:
[0040] The angle θ corresponding to the i-th data point i for:
[0041] θ i = ( i × 360 1024 - 30 ) × π / 180
[0042] Convert polar coordinates to rectangular coordinates to obtain data p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More