

Mobile robot cascading type map creating method based on mixed characteristics
A technology of mobile robots and mixed features, which is applied in the directions of maps/plans/charts, instruments, image enhancement, etc. It can solve the problem that the robot cannot provide room information, achieve the effect of preventing association failure, enriching room information, and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described in detail below in conjunction with the drawings.
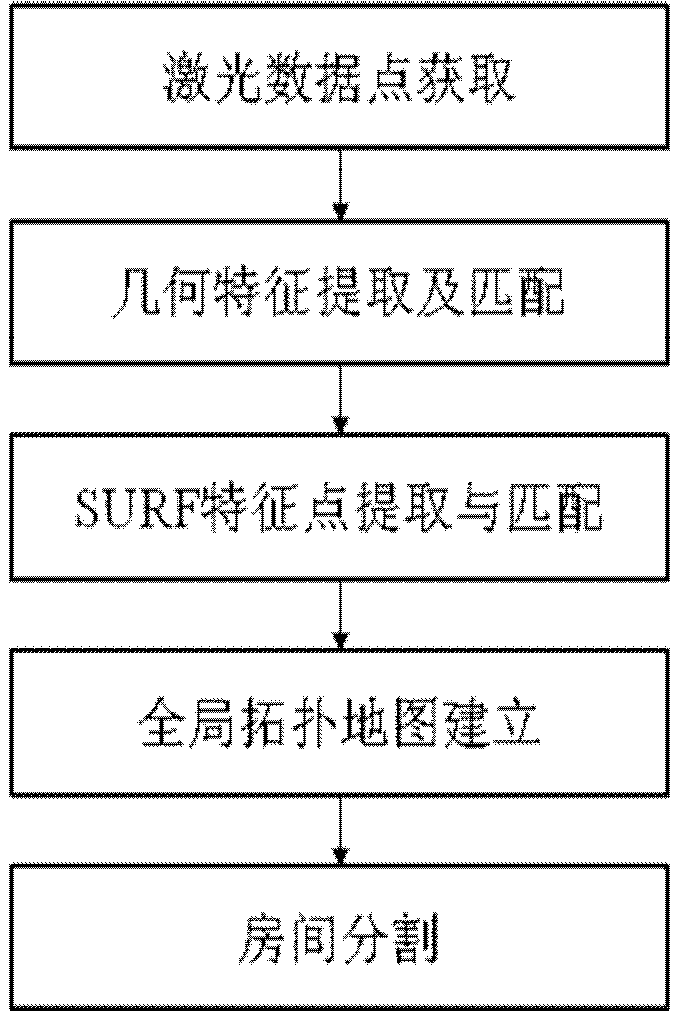
[0036] The main flow chart of the method of the present invention is as attached figure 1 As shown, including the following steps:
[0037] Step one, obtain laser data points, the specific method is as follows:
[0038] The measuring range of the laser sensor is 20~4000mm; the angular resolution: 0.36°; the scanning time: 100ms. It is characterized by high accuracy, high resolution and wide measurement range.
[0039] The principle of laser sensor data collection:
[0040] The angle θ corresponding to the i-th data point i for:
[0041] θ i = ( i X 360 1024 - 30 ) X π / 180
[0042] Convert polar coordinates to rectangular coordinates to obtain data point coordinates (X i ,Y i ):
[0043] X i =ρ i ×cosθ i ,Y i =ρ i ×sinθ i
[0044] Where ρ i Is the distance between the i-th data point measured by the laser sensor and the robot.
[0045] Step 2: E...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More