

A palletizing robot suction cup gripper device
A palletizing robot and gripper device technology, applied in the direction of manipulator, program-controlled manipulator, stacking of objects, etc., can solve the problems of random swing, unstable and reliable box materials, and inability to change.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
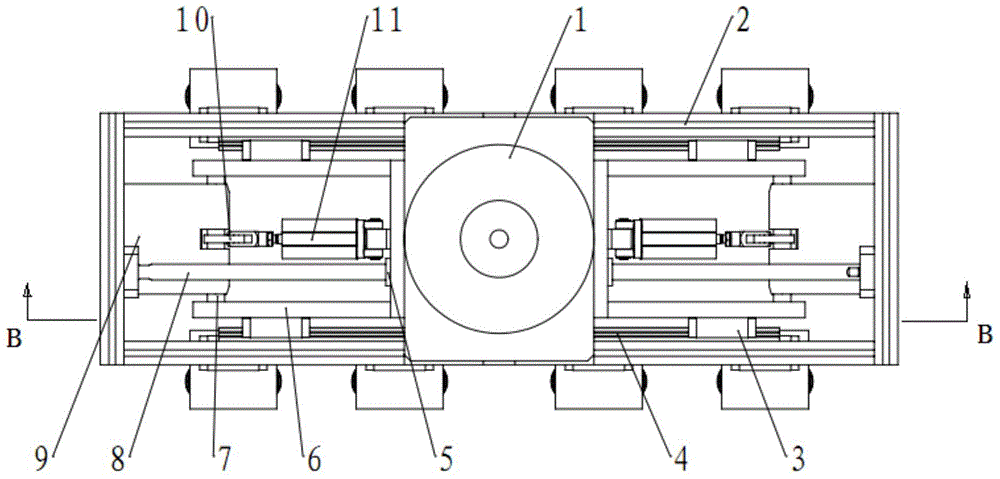
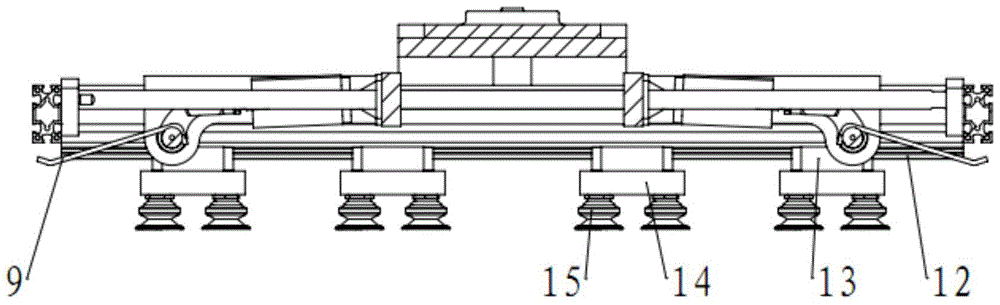
[0013] Referring to the accompanying drawings, a palletizing robot suction cup gripper device includes a connecting flange 1, a main frame, a splint mechanism, a width adjustment mechanism, and a suction unit; the main frame is composed of spliced aluminum profiles 2, and the connecting flange 1 is fixed on the main frame The top is fixedly connected with the mechanical wrist, and the splint mechanism includes a splint cylinder slide rail 4, a splint cylinder slide block 3, a splint cylinder 11, a splint support 6, a splint cylinder rotating shaft 7, and a splint cylinder swing arm 10, and the splint cylinder slide rail 4 is fixed on the On the main body frame, the splint cylinder slider 3 is fixed on the clamping cylinder slide rail 4, the clamping plate 9 is fixed on the splint cylinder rotating shaft 7, and the splint cylinder rotating shaft 7 is fixedly connected with the splint cylinder 11 through the splint cylinder swing arm 10, The splint cylinder 11 is fixed on the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More