

Mechanical joint and robot arm comprising same
A technology of mechanical joints and robotic arms, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of difficult sharing of components, unreduced cost, and different sizes of robotic arms, so as to reduce the range of deceleration, save space configuration, The effect of increasing the output torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] The following will clearly illustrate the spirit of the present invention with drawings and detailed descriptions. Anyone with ordinary knowledge in the technical field can change and modify the technology taught by the present invention after understanding the preferred embodiments of the present invention. without departing from the spirit and scope of the present invention.
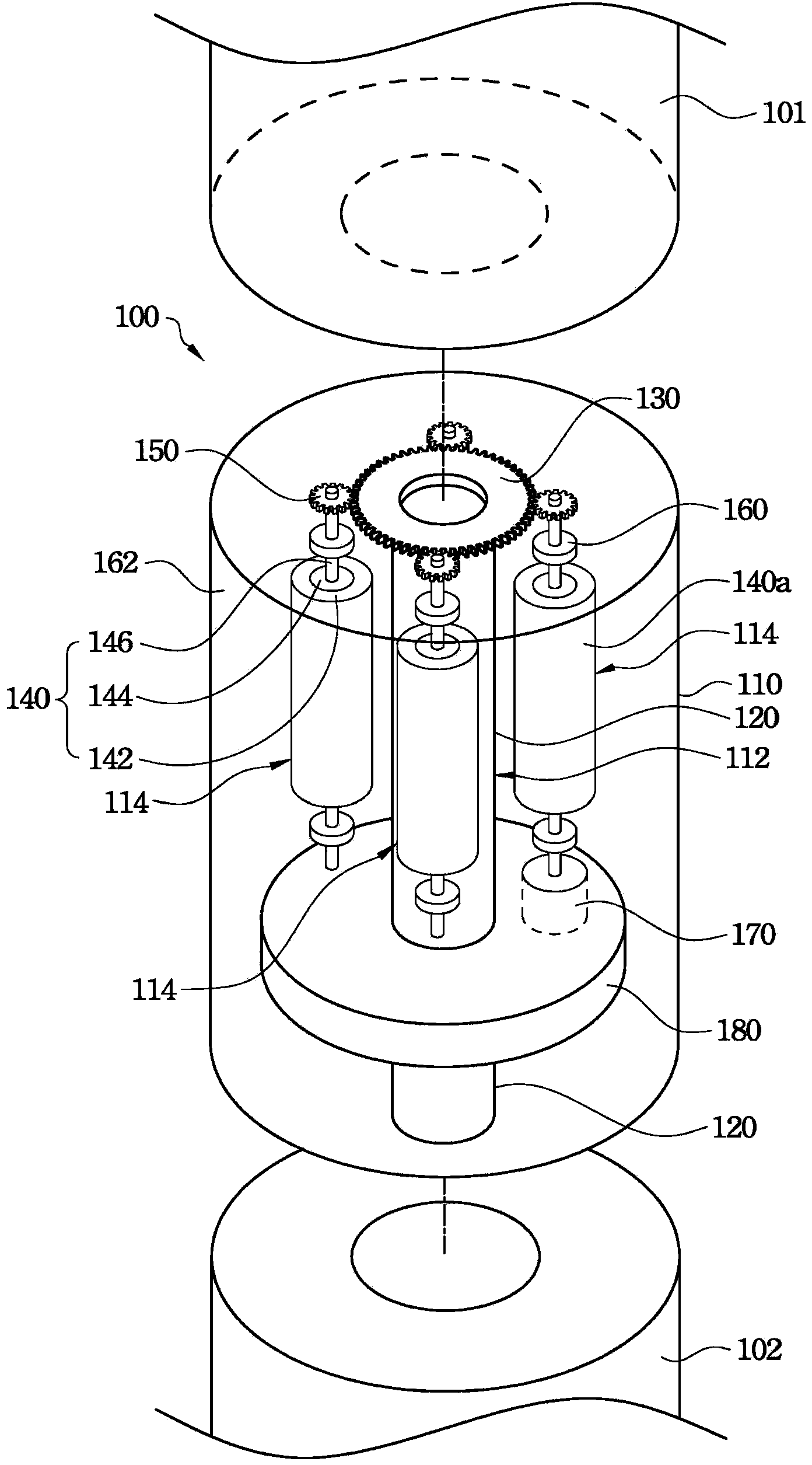
[0068] refer to figure 1 , which shows a perspective view of an embodiment of the mechanical joint of the present invention. The mechanical joint 100 includes a casing 110 , a hollow shaft 120 , a first gear 130 , a plurality of motors 140 and a plurality of second gears 150 . The casing 110 includes a first cavity 112 for accommodating the hollow shaft 120 and a plurality of second cavities 114 for accommodating the motor 140 . The second cavities 114 are disposed around the first cavity 112 . The cross-sectional shapes of the first hole 112 and the second hole 114 are circular, and the cross...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More