

A Sitting-Horizontal Lower Limb Rehabilitation Robot
A rehabilitation robot, sitting and lying technology, applied in gymnastics equipment, passive exercise equipment, sports accessories, etc., can solve problems such as difficulty in seating and inability to guarantee the thigh training of patients, and achieve the effect of structural modularization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Hereinafter, embodiments of the present invention will be described with reference to the drawings.
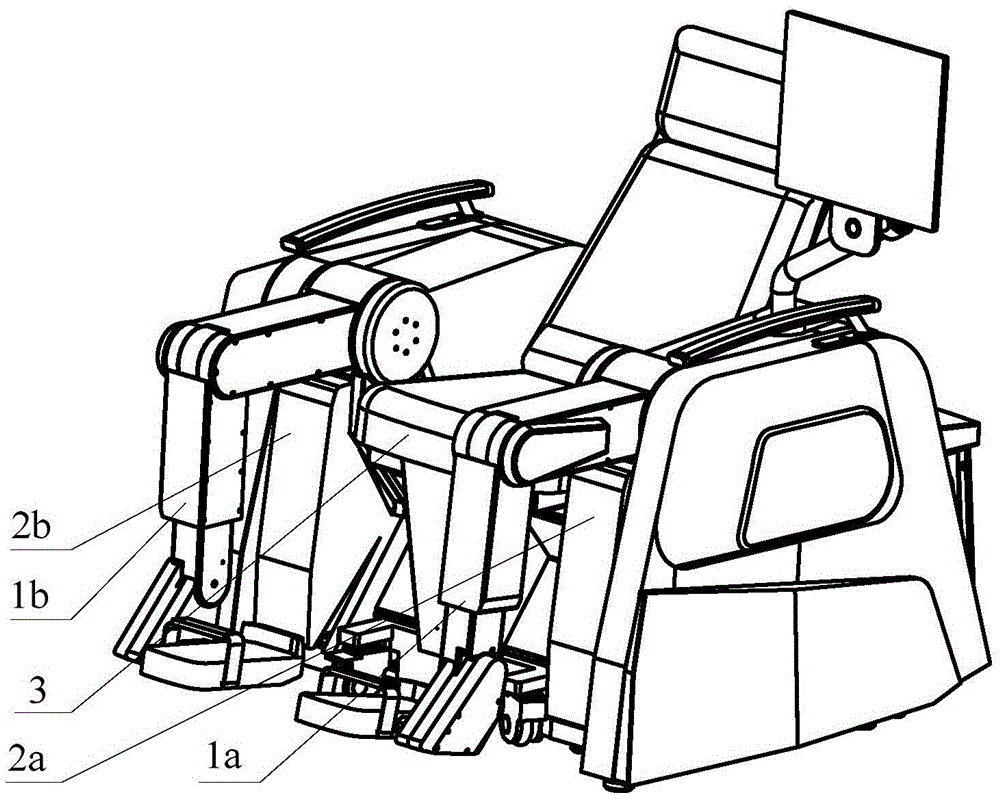
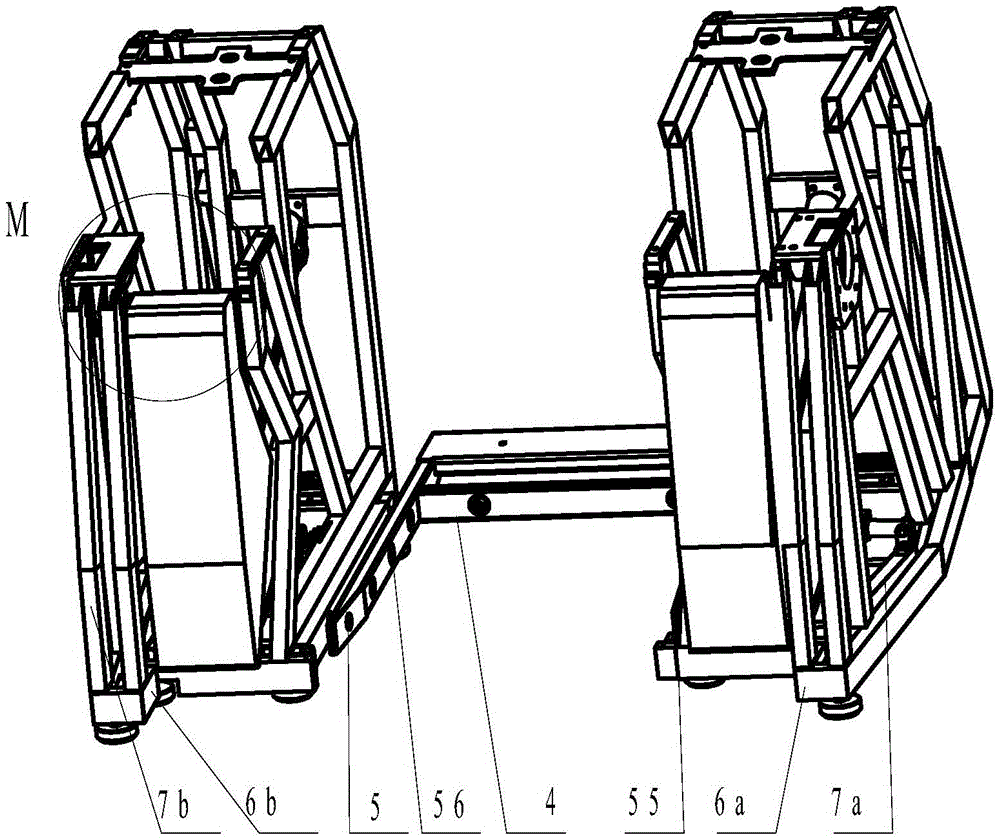
[0027] A sitting and lying lower limb rehabilitation robot, comprising a mechanical leg, a frame, a seat and a control system. The mechanical leg includes a structurally symmetrical left mechanical leg 1a and a right mechanical leg 1b. The frame includes a structurally symmetrical left mechanical leg frame 2a, right frame 2b (see figure 1 ). Due to the symmetrical structure, only the left part of the mechanical structure will be introduced below. The left frame 2a comprises a left static frame 6a and a left moving frame 7a, and the left static frame 6a and the right static frame 6b are fixedly connected with the middle connecting bracket 4 by hexagon socket head cap screws 5 (see Figure 2a ); the left mechanical leg 1a is installed on the left frame 2a through the swing frame 10, and the swing frame 10 is installed on the left moving frame of the left frame 2a by bol...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More