

A dynamic descending speed limiting device for a high-altitude cable climbing robot
A speed-limiting device and robot technology, applied in motor vehicles, brakes, transportation and packaging, etc., can solve the problems of slow return to the ground, attenuation of braking force, failure to achieve speed-limited braking, etc. The effect of high utilization and integration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific preferred embodiments.
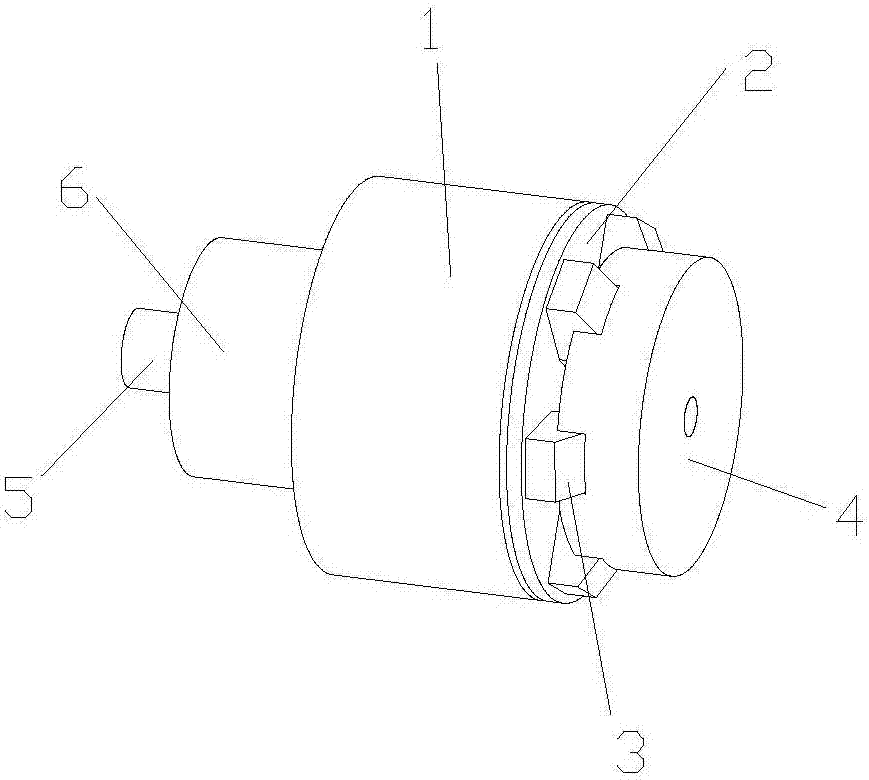
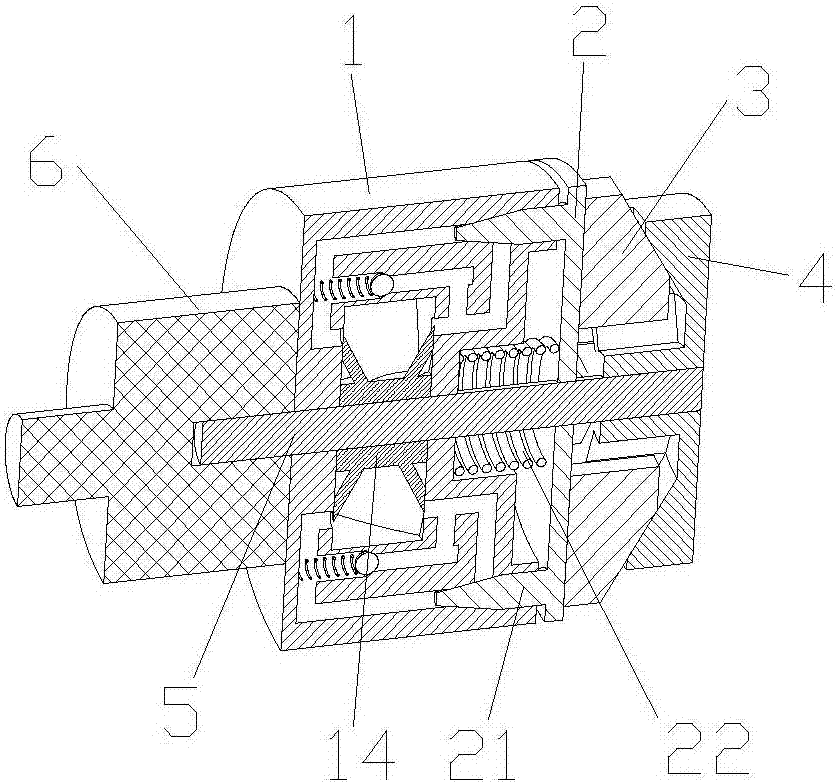
[0057] Such as figure 1 and figure 2 As shown, a dynamic descending speed limiting device for a high-altitude cable climbing robot includes a stator 1, a rotor 4, a mandrel 5, a speed increaser 6, an impeller 14, a compression spring 22, a sliding disc 2, an inertia block 3, Steel ball 26 and spring 15.
[0058] The speed increaser 6, the stator 1, the sliding disc 2 and the rotor 4 are coaxially sleeved on the outer periphery of the mandrel 5 sequentially from left to right. Wherein, the speed increaser 6 can be set as required. When the speed increaser 6 is provided, the speed increaser 6 is preferably fixedly connected to the end surface of the stator 1 .
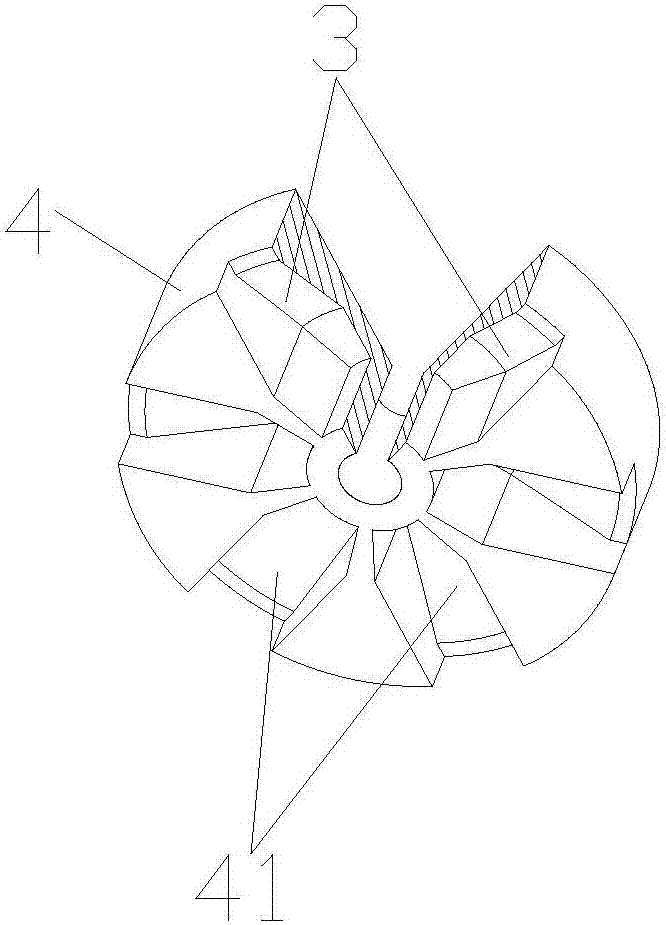
[0059] Such as Figure 3 to Figure 6 As mentioned above, the side of the rotor 4 adjacent to the sliding plate 2 is evenly provided with several inclined chute 4...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More