

Cable-driven six-degree-of-freedom parallel rehabilitation device
A rehabilitation device and cable-driven technology, which are used in appliances that help people move around, physical therapy, etc., can solve the problems of the flexible parts, that is, the length of the rope is difficult to control, the horizontal movement displacement of the rehabilitation patient is small, and the number of degrees of freedom of the motion platform is small. To achieve the effect of easy control and motion output, large motion space, and easy operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention is described in detail below in conjunction with accompanying drawing:
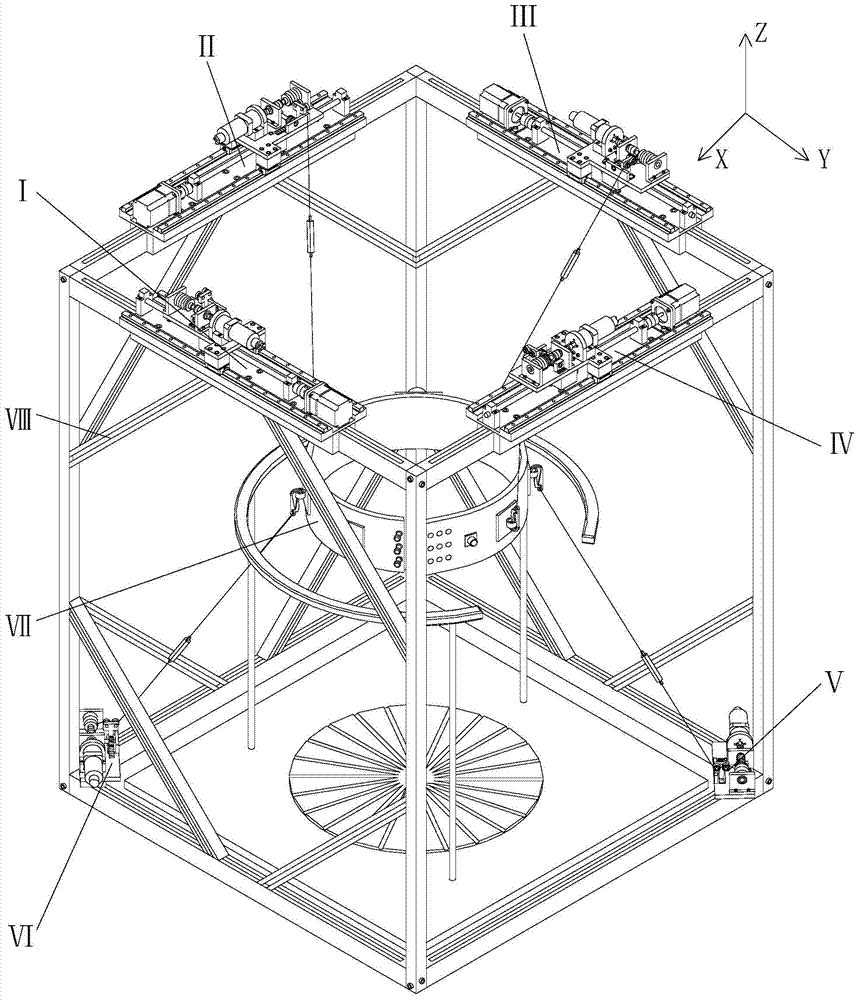
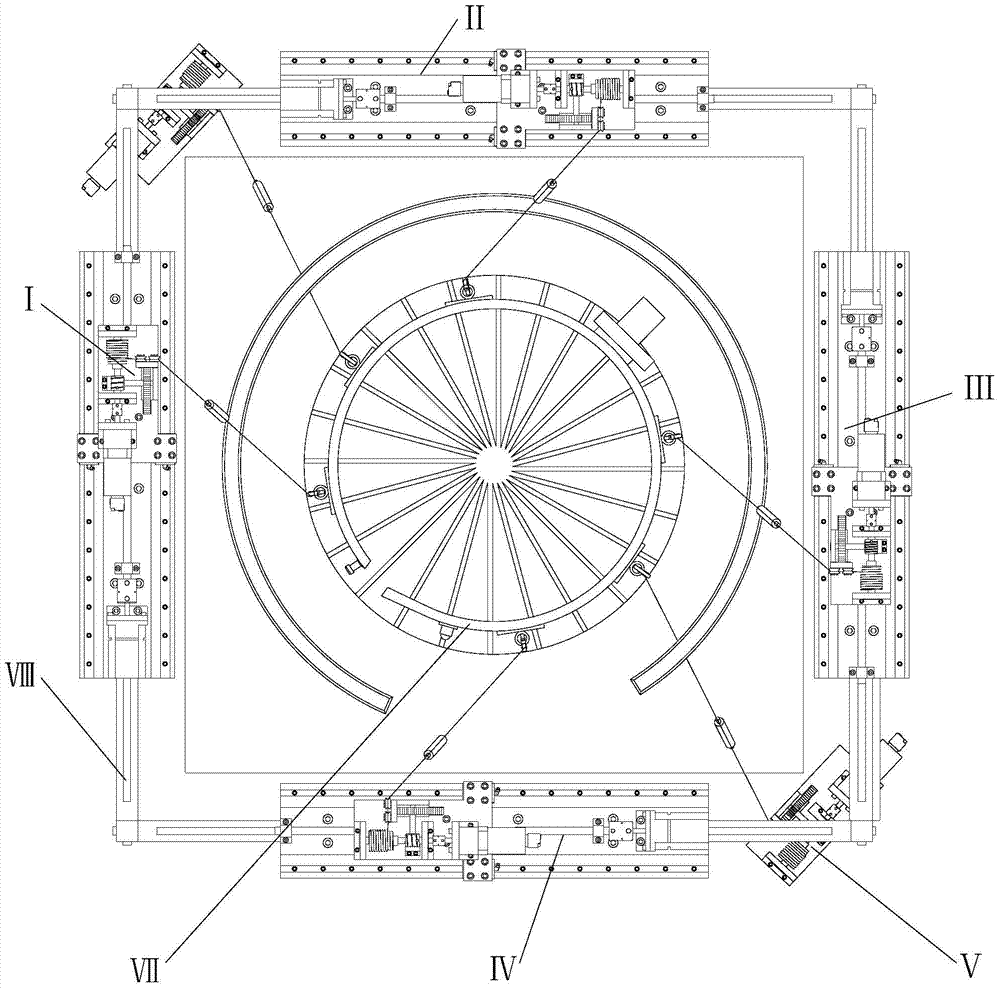
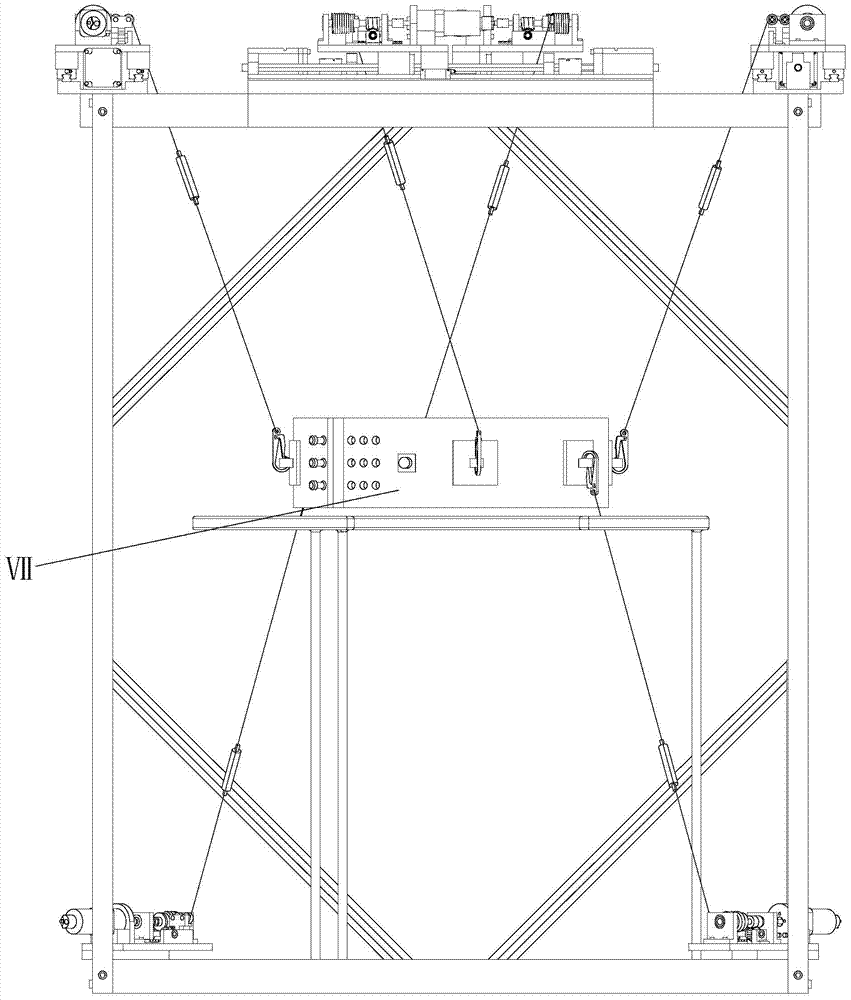
[0038] refer to figure 1 , the cable-driven six-degree-of-freedom parallel rehabilitation device of the present invention includes a first mobile drive mechanism I, a second mobile drive mechanism II, a third mobile drive mechanism III, a fourth mobile drive mechanism IV, and a first fixed drive mechanism Ⅴ. Fixed driving second mechanism Ⅵ, rope rehabilitation mechanism Ⅶ and bracket Ⅷ.
[0039] The structures of the first mobile driving mechanism I, the second mobile driving mechanism II, the third mobile driving mechanism III and the fourth mobile driving mechanism IV are exactly the same, and their connection modes with the bracket VIII are exactly the same. The structure of the fixed driving first mechanism V and the fixed driving second mechanism VI are exactly the same, and their connection mode with the bracket VIII is completely the same.
[0040] The first mobile d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More