Method and device for determining location information of sub-subsystem in distributed collaborative system
A technology of position information and cooperative system, applied in the field of electronics, can solve the problems of non-coincidence of position centers, large position information error of the main sub-system of the sub-sub-system and the main sub-system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
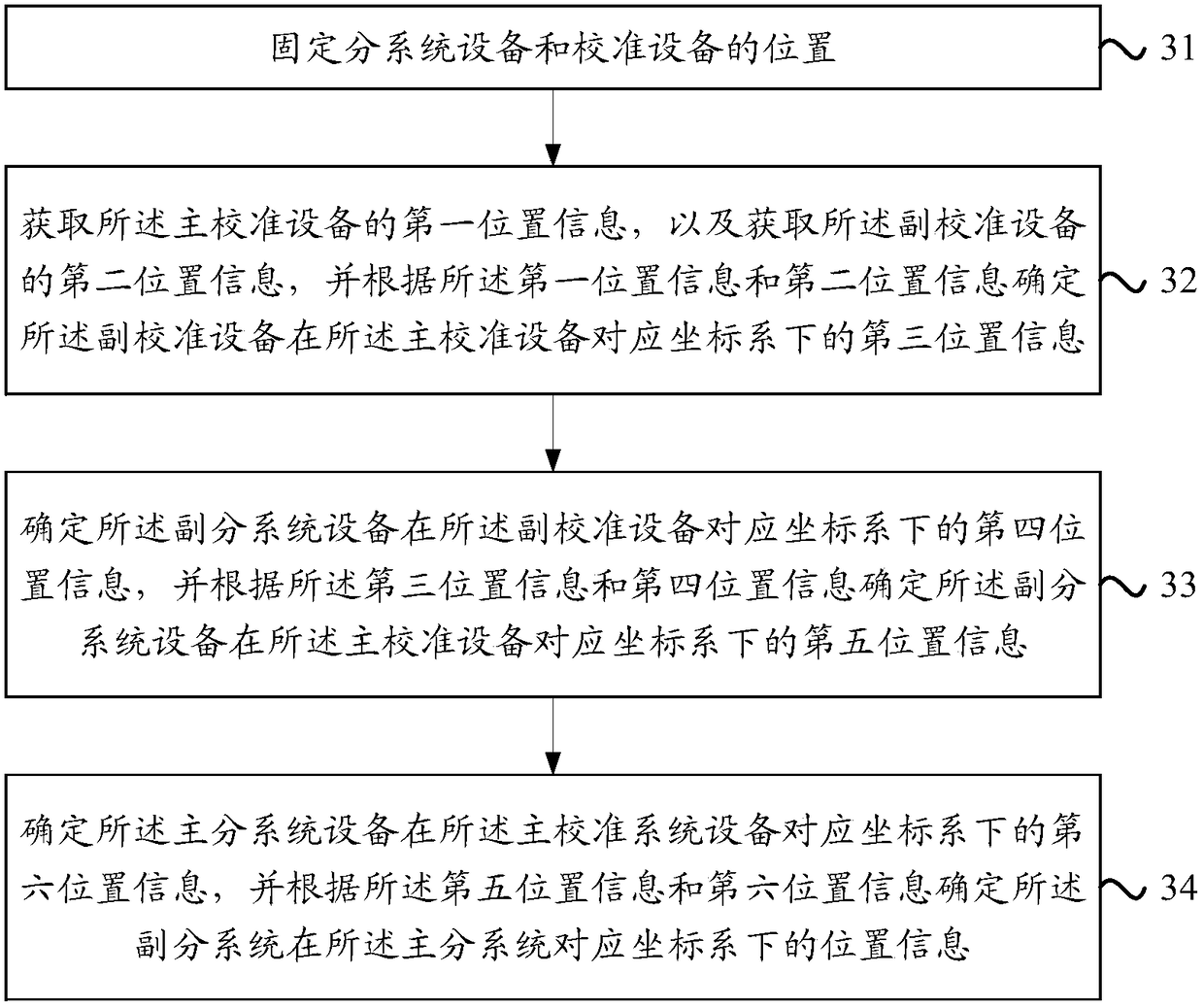
[0048] Embodiment 1 provides a method for determining the location information of the sub-system in a distributed collaborative system, which is used to solve the problem that the position center of the sub-system and the calibration equipment do not coincide in the prior art. The location information error of the subsystem is relatively large. The specific flow chart of the method is shown in image 3 shown, including the following steps:
[0049] Step 31: Fix the positions of subsystem equipment and calibration equipment, wherein the subsystem equipment includes main subsystem equipment and auxiliary subsystem equipment, and the calibration equipment includes main calibration system equipment and auxiliary calibration system equipment.
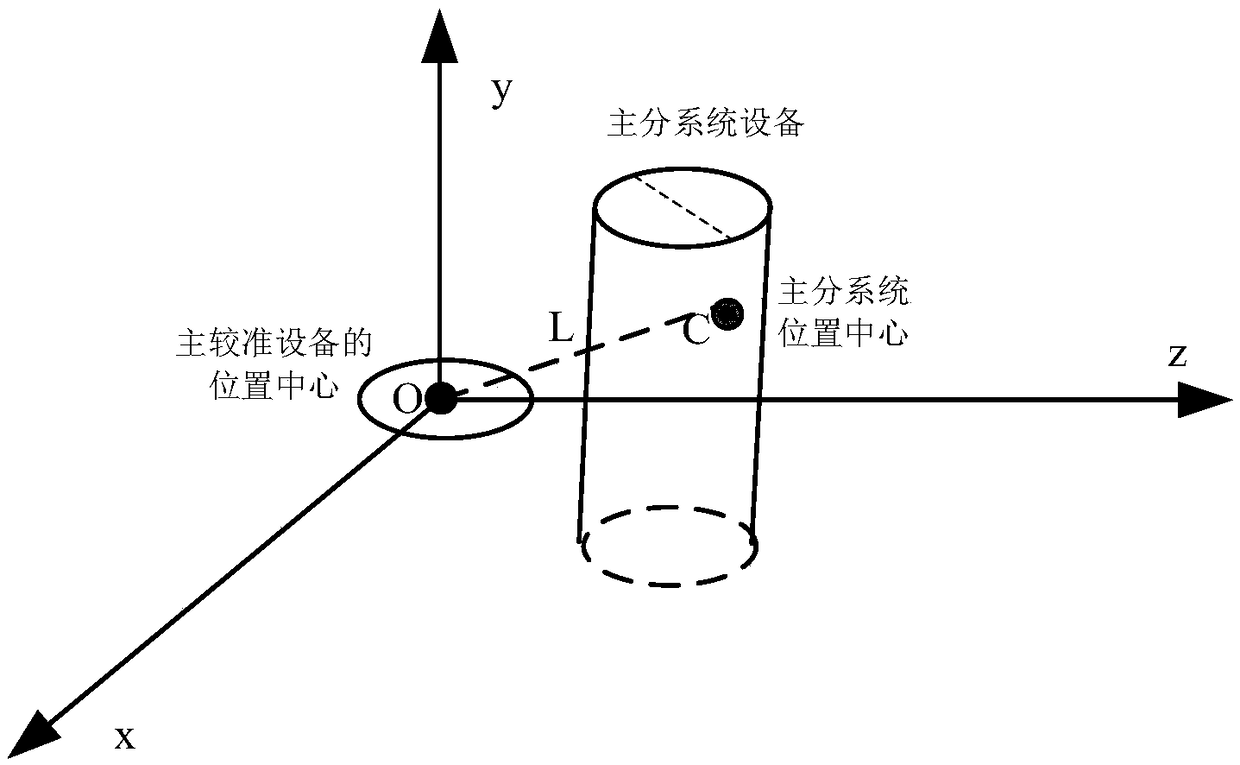
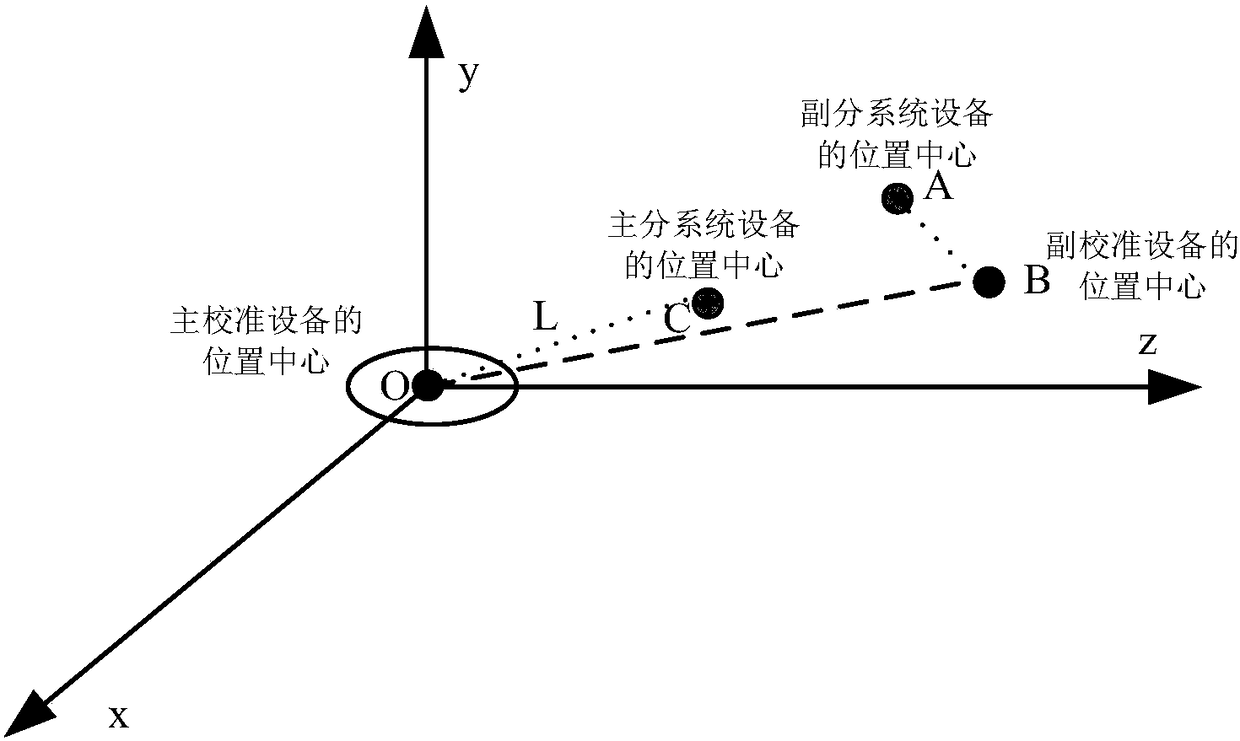
[0050] As mentioned above, when determining the location information of the sub-system relative to the main sub-system according to the location information of the main sub-system, install the main sub-system equipment and sub-subsystem equ...
Embodiment 2
[0100] Embodiment 1 provides a method for determining the location information of the sub-subsystem in the distributed collaborative system. Correspondingly, the embodiment of the present invention provides a device for determining the location information of the sub-subsystem in the distributed collaborative system, for It solves the problem in the prior art that the obtained position information of the sub-system relative to the main sub-system has a large error due to the misalignment of the position centers of the sub-system equipment and the calibration equipment. The specific structure of the device is as Figure 5 As shown, the device includes:
[0101] The fixing unit 51, the acquiring unit 52, the first determining unit 53 and the second determining unit 54, wherein:
[0102] The fixing unit 51 can be used to fix the positions of the subsystem equipment and the calibration equipment, wherein the subsystem equipment includes the main subsystem equipment and the auxili...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com