

Control method of manipulator grabbing control system based on binocular stereoscopic vision
A technology of binocular stereo vision and control method, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc. It can solve the problems of difficult positioning accuracy and poor product recognition rate, so as to solve automation problems, reduce labor costs, and improve production. efficiency effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to further explain the technical means and effects of the present invention to achieve the intended purpose of the invention, the control of a binocular stereo vision-based manipulator grasping control system proposed according to the present invention will be described below in conjunction with the accompanying drawings and preferred embodiments. Method The specific methods, steps and effects thereof are described in detail below.
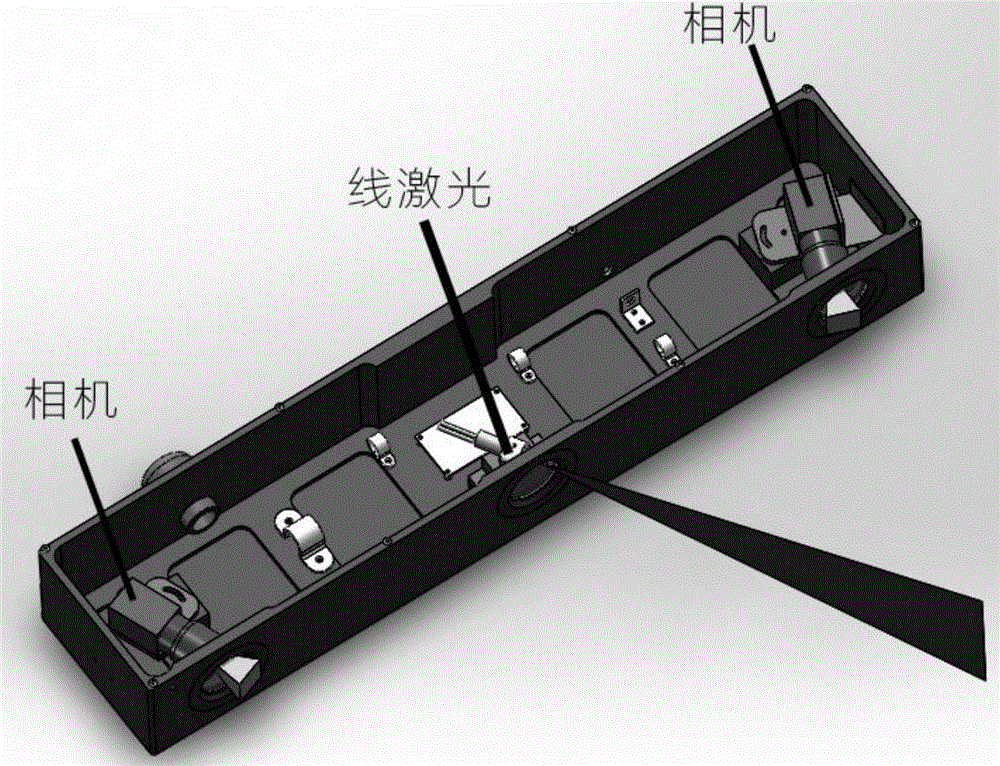
[0034] see Figure 1-5 , the present invention a kind of control method based on the manipulator grasping control system of binocular stereovision, comprises the following steps:
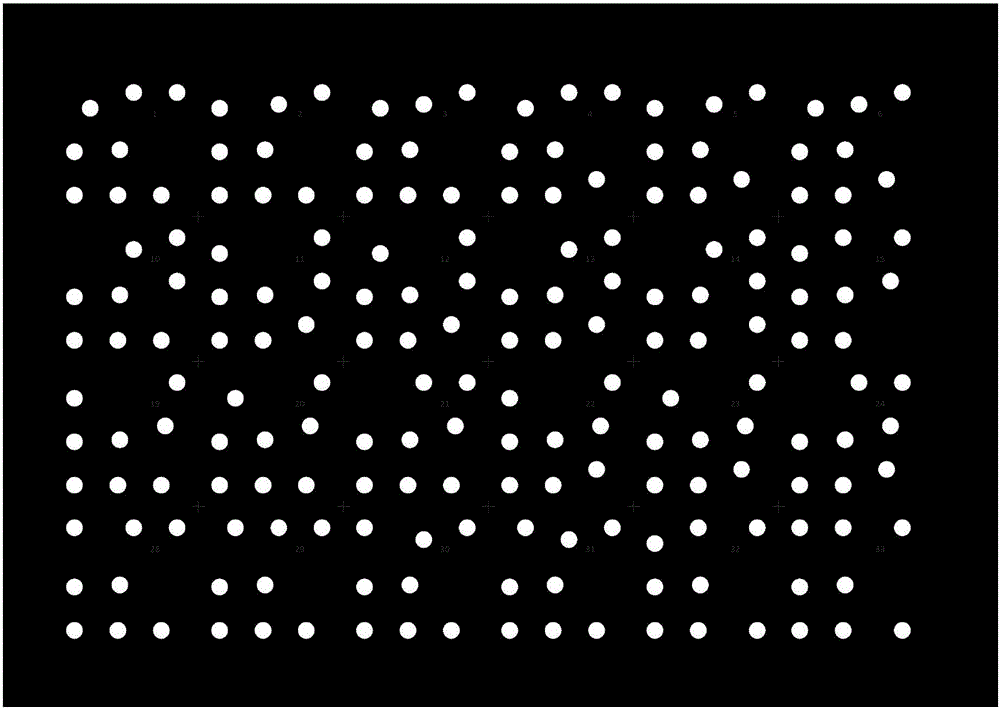
[0035] 1) Calibrate the internal parameters and external parameters of the camera, and then realize the conversion between the camera coordinate system and the manipulator coordinate system by teaching the manipulator. In the implementation of the present invention, the camera is calibrated by the coded circular mark point, and the teaching of the manip...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More