

Optimization method for spacecraft iterative guidance
An optimization method, spacecraft technology, applied in design optimization/simulation, instrumentation, constraint-based CAD, etc., can solve problems such as poor orbit entry accuracy, non-adjustable thrust size, and complex data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
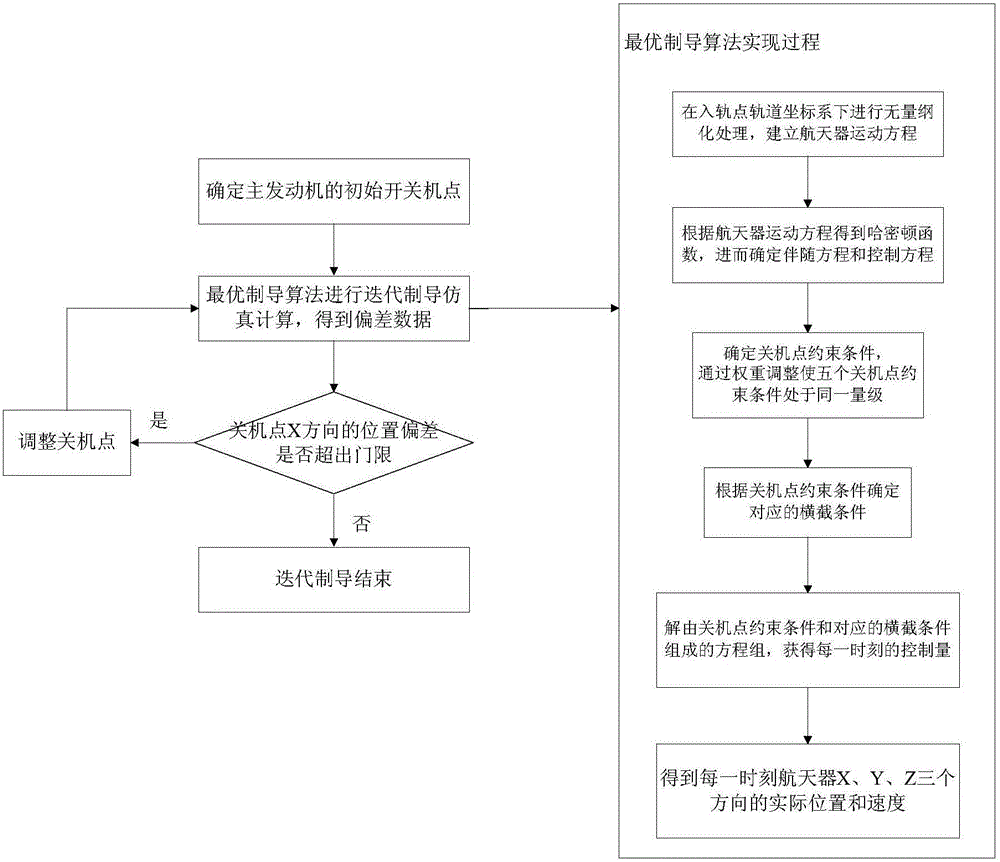
[0134] Take the iterative guidance optimization of a certain spacecraft as an example:
[0135] In the launching inertial system, the initial position of the spacecraft is [1865014.8, 40816.2, 150433.5]m, and the speed is [7412.601, -2160.522, -130.991]m / s. D. final The position of the point is [-5967060.6,-9089564.4,-89871.6]m, and the speed is [-3054.343,7167.845,286.663]m / s.
[0136] The simulation calculation step size is selected as 10ms, the termination iteration calculation condition is selected when the remaining analysis time is less than 5s, and the three shutdown point conditions are when the remaining flight time is less than 0.1s. The weight factor of the terminal constraint is taken as k 1 =10 -4 、k 2 =10 -4 、k 3 =10 -3 、k 4 =10 -3 、k 5 =10 -4 .
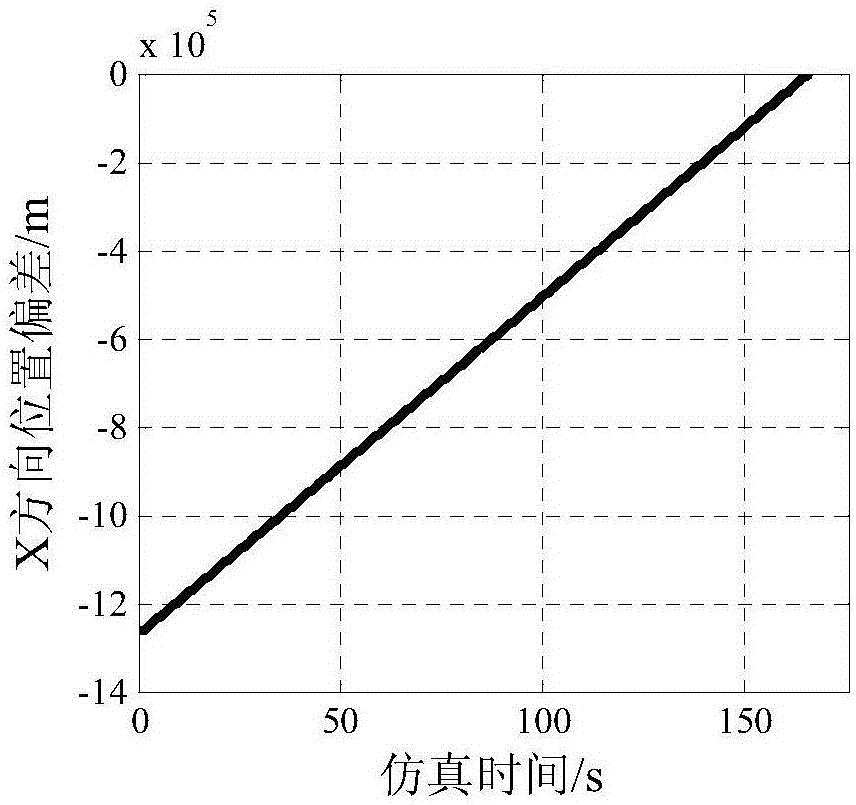
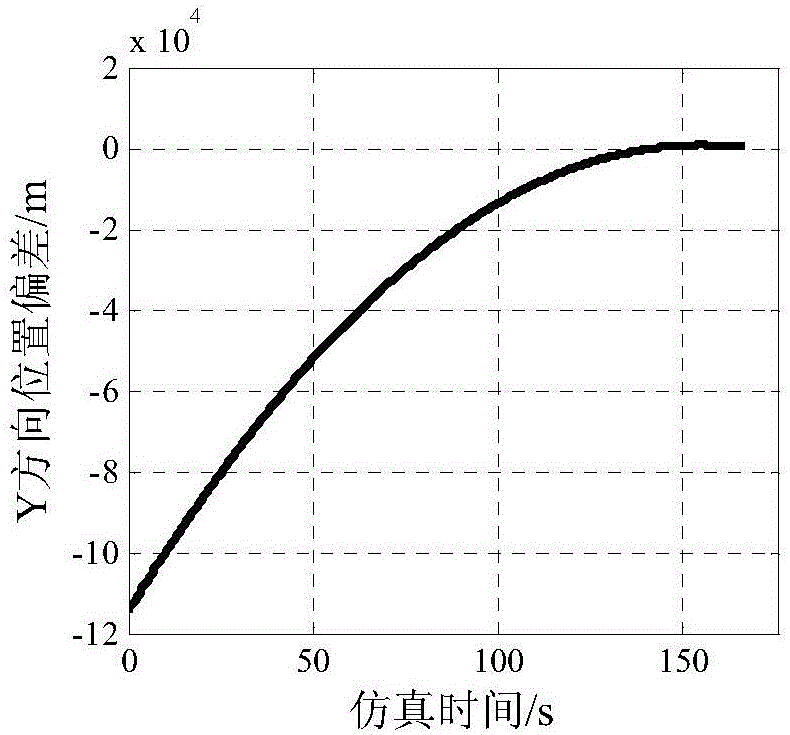
[0137] Firstly, the guidance simulation is directly performed on the primary switch points, and the deviation data after the guidance is completed are shown in Tables 1 and 2:
[0138] Table 1 position devi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More