

A cascaded electro-hydraulic servo system control method and system based on coupling disturbance observer
An electro-hydraulic servo system and electro-hydraulic servo technology are applied in the direction of fluid pressure actuation system components, instruments, and electrical digital data processing, etc., which can solve the problems of reduced control accuracy and great influence on the dynamic response performance of joint motion tracking.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The following provides a specific real-time method of the electro-hydraulic servo-driven cascaded mechanical arm mechanism based on the coupling disturbance observer and the backstepping control method of the present invention.
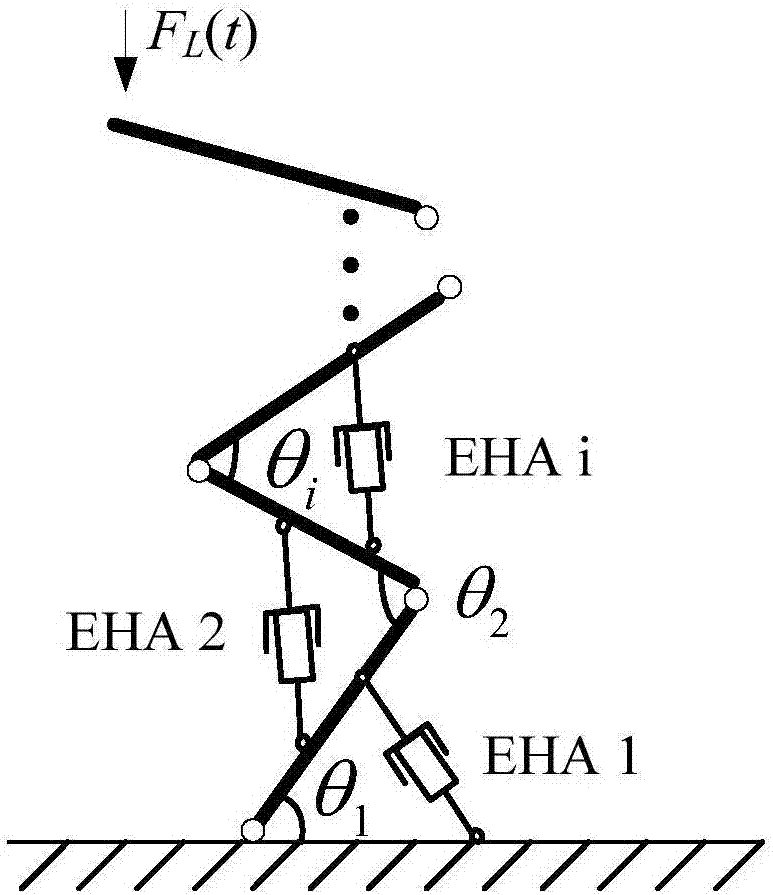
[0040] The model of the electro-hydraulic servo actuator is a 4th-order model. The model of the mechanical arm mechanism movement is not considered. The joint torque required for the mechanical arm movement is considered as the load disturbance of the electro-hydraulic servo actuator. The brief description is as follows:
[0041] 1) Modeling of electro-hydraulic servo actuator
[0042] A fourth-order model is used to describe the electro-hydraulic servo actuator model of the hydraulic cylinder circuit driven by the servo valve as follows:
[0043]
[0044] i=1,...n
[0045] in is the fourth-order model state variable of the i-th cascaded electro-hydraulic servo actuator, y i is the output displacement of the i-th hydraulic cylinder, is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More