

Electro-hydraulic servo control method based on fading memory filtering and 2-DOF mechanical arm
An electro-hydraulic servo and attenuation memory technology, which is applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of uncertain parameter constants, inability to estimate time-varying parameters, external interference, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The following provides a specific real-time manner of the 2-DOF robotic arm motion control device based on the attenuation memory filter and the parameter adaptive estimation method of the present invention.
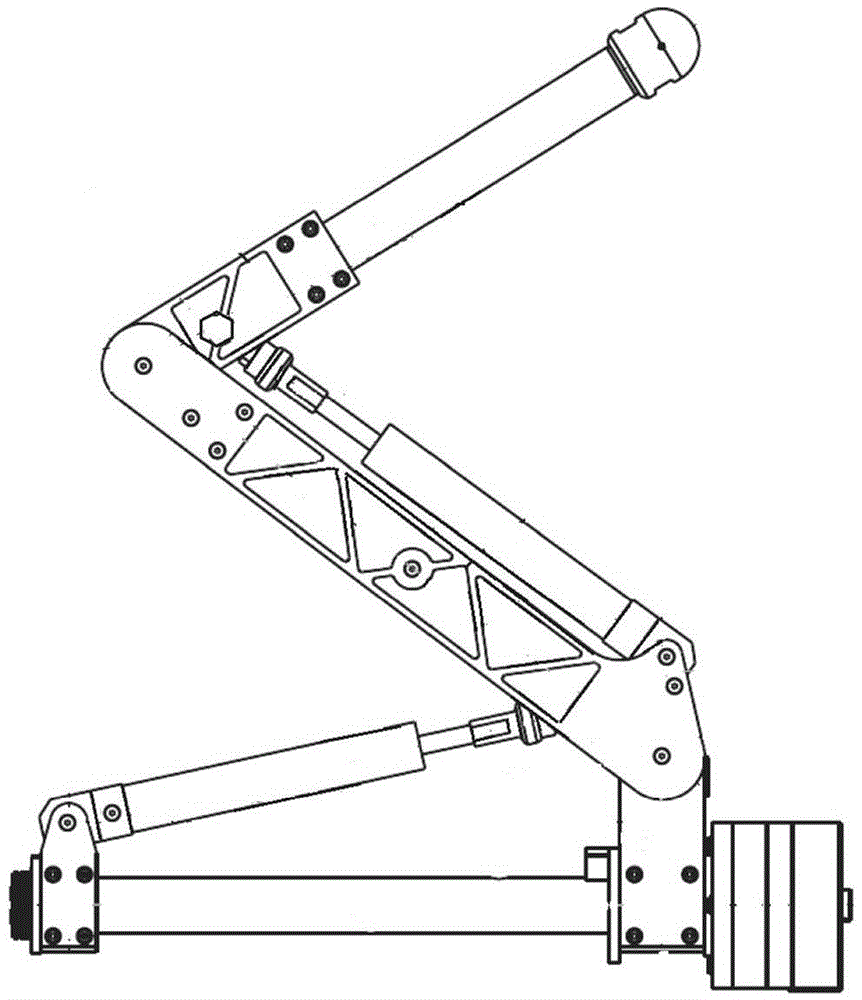
[0039] The model of the whole system is divided into two parts, including the model of electro-hydraulic servo actuator and the load force model of 2-DOF manipulator. They are briefly described as follows:
[0040] 1) Modeling of electro-hydraulic servo actuator
[0041] The four-order model is used to describe the electro-hydraulic servo actuator model of the servo valve driving hydraulic cylinder circuit as follows:
[0042]
[0043] where x i (i=1,...,4) is the model state variable, y hydraulic cylinder output displacement, is the output displacement rate of change, p L is the load pressure, x v is the displacement of the spool of the servo valve, is an uncertain parameter, m is the load mass, p s is the oil supply pressure, A p is the cross-sect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More