Self-moving robot relocation method and self-moving robot using method
A repositioning and robot technology, applied in the direction of instruments, two-dimensional position/channel control, measuring devices, etc., can solve problems such as constraining the range of values, and achieve the effect of improving positioning success rate and improving matching efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
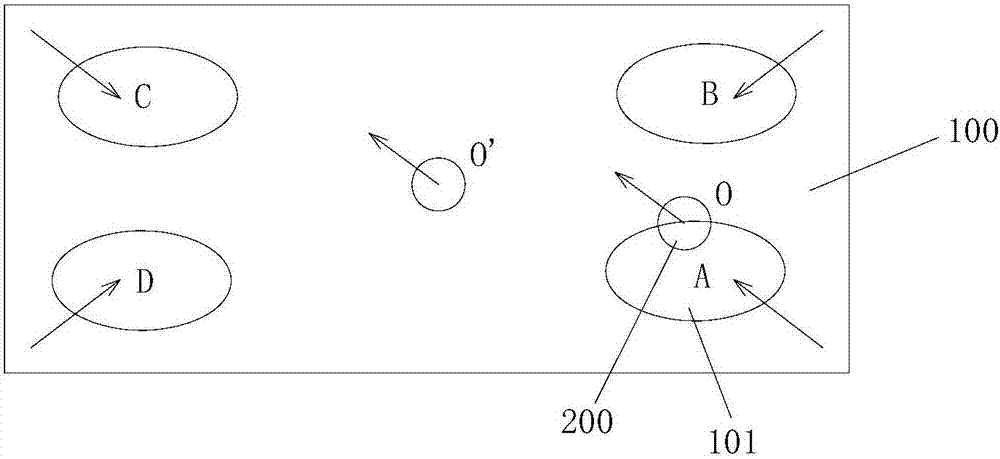
[0039] The present invention provides a repositioning method for a self-mobile robot. When the self-mobile robot is walking in a pre-stored map, when the external force moves it from the first working position to the second working position, the positioning failure occurs. The second working position is repositioned, and the second working position is set as a reset position.
[0040] The repositioning method includes the steps of:
[0041] Step 100: Designate a reference point O near the reset position through a pre-stored map;
[0042] Step 200: The self-mobile robot scans the reset position as a base point, establishes a temporary local environment map near the reset position, and compares the temporary local environment map with the pre-stored map near the reference point O Matching, looking for the optimal pose;
[0043] Step 300: the matching is successful, and the self-mobile robot completes repositioning in the pre-stored map of the second working area.
[0044] For...
Embodiment 2
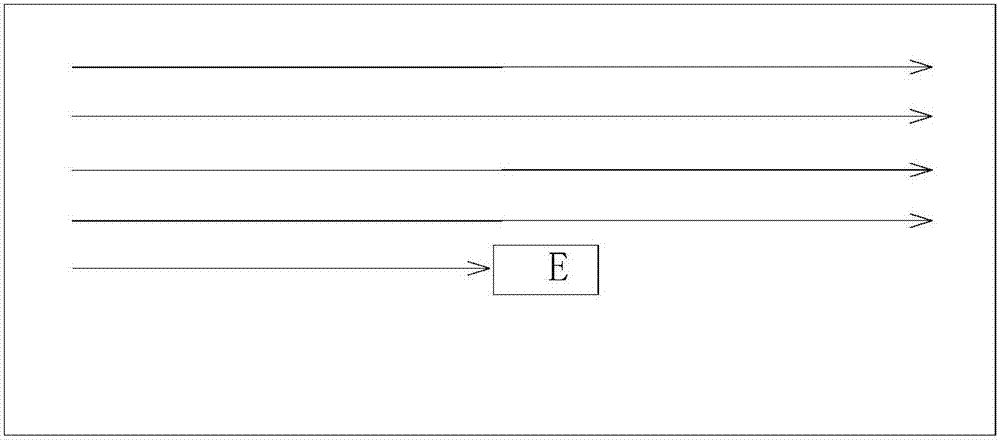
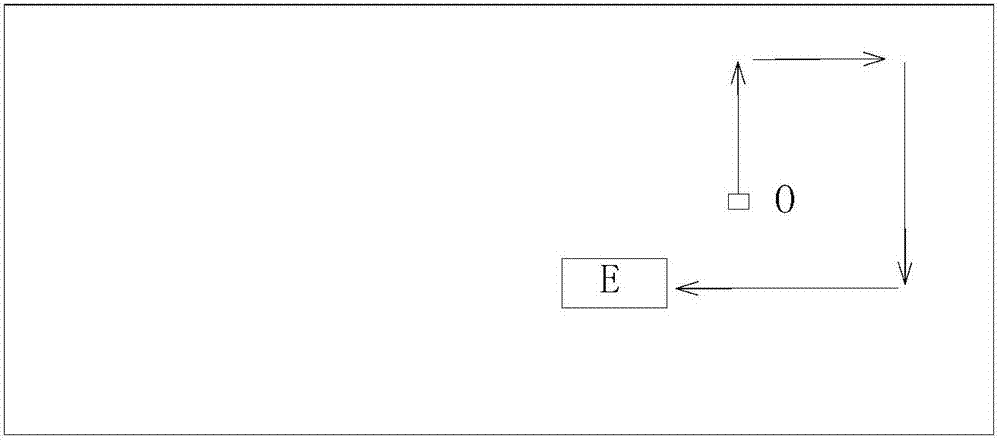
[0062] The difference between this embodiment and Embodiment 1 is that in addition to using feature extraction for matching, the matching in step 200 can also be based on the extracted grid map according to the outline in the scanned temporary local environment map. matches, including:
[0063] Step 210: The self-mobile robot scans with the reset position as a base point;
[0064] Step 220: Establish a temporary local environment map near the reset position, and compare the scanned grid map in the temporary local environment map with the center corresponding to the reference point O and where the reference point O is located. The pre-stored grid map in the pre-stored map of the region is compared for registration;
[0065] Step 230: After finding the grid feature with the highest similarity with the scanned grid map in the pre-stored map, calculate the coordinates and orientation of the reset location, and proceed to step 300.
[0066] In other words, the content of this emb...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com