

Communication topology fault tolerance optimization method and apparatus in cooperative formation of a plurality of unmanned aerial vehicles
A communication topology and multi-UAV technology, which is applied in the field of communication topology fault-tolerant optimization, can solve communication failures, UAVs cannot continue to maintain formation formation, and communication links cannot be used. Effects of man-machine collision accidents
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
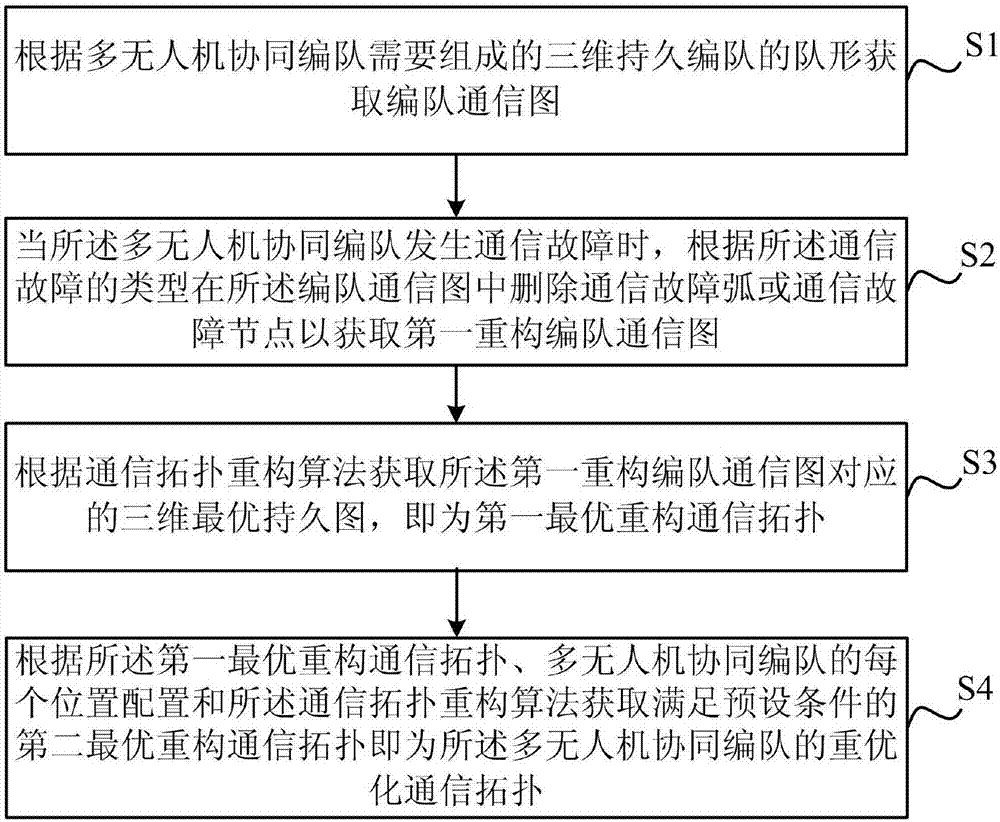
[0026] figure 1 A communication topology fault-tolerant optimization method in multi-UAV cooperative formation provided for an embodiment of the present invention, the method includes:
[0027] S1. Obtain the formation communication map according to the formation of the three-dimensional persistent formation that needs to be formed by multi-UAV cooperative formation.
[0028] The formation control method of the three-dimensional persistent formation composed ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More