

Grab bucket horizontally dredging control method and system for dredger
A control method and control system technology, applied in the field of dredging engineering, can solve problems such as no horizontal excavation function
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
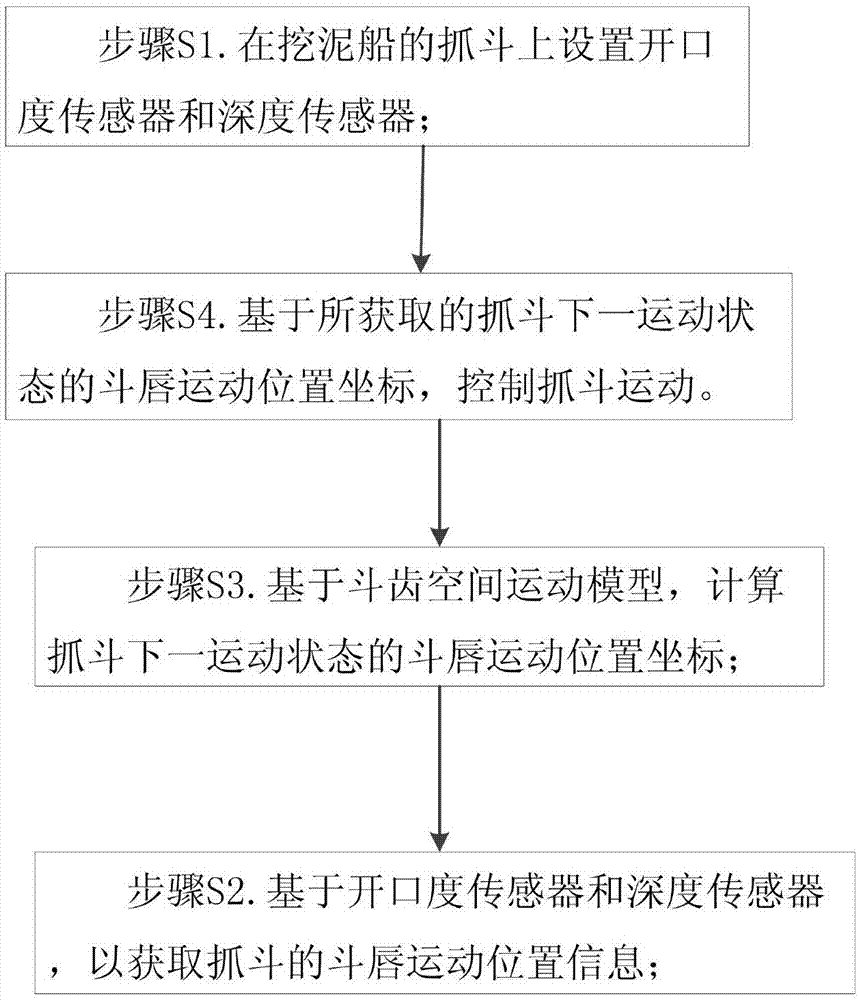
[0027] see figure 1 As shown, the present invention provides a grab level excavation control method of a dredger, comprising the following steps:
[0028] Step S1. Set the opening degree sensor and the depth sensor on the grab bucket of the dredger;
[0029] Step S2. Based on the opening degree sensor and the depth sensor, the bucket tooth movement position information of the grab bucket is obtained, wherein the bucket tooth movement position information includes the depth parameter and the opening degree parameter of the bucket tooth of the grab bucket;
[0030] Step S3. Based on the spatial motion model of the bucket teeth, calculate the motion position coordinates of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More