AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A technology for unmanned vehicles and car bodies, which is applied in vehicle components, installation, optics, etc., and can solve problems such as barriers to popularization and reliability of unmanned vehicles
Inactive Publication Date: 2018-03-06
NANJING CHINA UNIV INTPROP CO LTD
View PDF5 Cites 3 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0003] However, unmanned vehicles have caused certain obstacles in popularization due to reliability issues.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
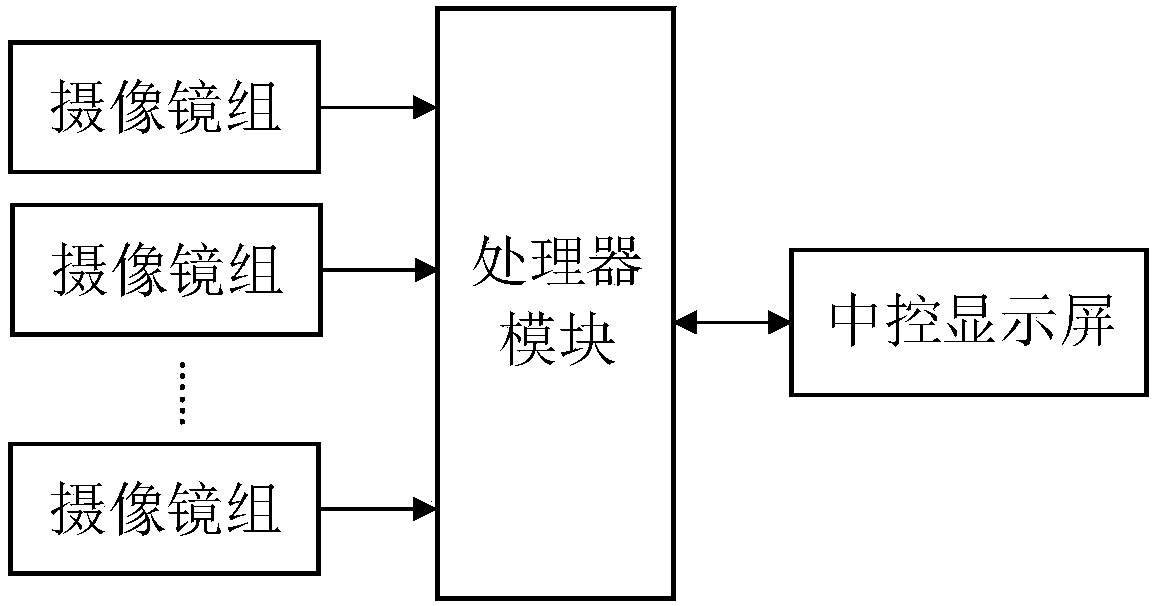
[0040] Such as figure 1 As shown, the embodiment of the present invention provides a driverless car, including:
[0041] A plurality of camera mirror groups arranged around the vehicle body, and a processor module electrically connected to each camera mirror group, and the processor module is also connected to the central control display screen;
[0042] Each of the imaging mirror groups is suitable for collecting image data in corresponding directions of the vehicle body;
[0043] The processor module is suitable for identifying objects in the image data, and when the object is identified as a dangerous object, the central control display screen sends an alarm signal; it can also control the car to avoid.
[0044] The processor module can be an ARM processor module; each camera mirror group can be located at the front of the car body, the parking space and the two sides of the car, and there are at least four; The large truck is identified in the image data of the side came...
Embodiment 2
[0093] On the basis of embodiment 1, this embodiment 2 provides a working method for driverless cars, including:
[0094] A plurality of camera mirror groups arranged around the vehicle body, and a processor module electrically connected to each camera mirror group, and the processor module is also connected to the central control display screen;
[0095] Each of the imaging mirror groups is suitable for collecting image data in corresponding directions of the vehicle body;
[0096] The processor module is suitable for identifying objects in the image data, and when the object is identified as a dangerous object, the central control display screen sends an alarm signal and controls the vehicle to avoid.
[0097] In this embodiment, the structure, working principle and working process of the self-driving car have been described in detail in Embodiment 1, and will not be repeated here.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention relates to a pilotless automobile and a working method thereof. A panoramaimage system comprises a plurality of camera shooting mirror sets located on the periphery of an automobile body and a processor module which is electrically connected with the camera shooting mirror sets, wherein the processor module is also connected with a central control display screen; each camera shooting mirror set is suitable for acquiring image data in corresponding directions of the automobile body; the processor module is suitable for recognizing objects in the image data; and when objects are recognized as dangerous objects, the central control display screen sends out a warning signal and controls the automobile to avoid the dangerous objects.
Description
technical field [0001] The invention belongs to the field of automobiles, and in particular relates to an unmanned automobile and a working method thereof. Background technique [0002] At present, unmanned driving technology is developing rapidly, and unmanned cars are gradually entering people's eyes. [0003] However, due to reliability issues, unmanned vehicles have caused certain obstacles in popularization. [0004] Therefore, how to improve the reliability of unmanned vehicles is an urgent technical problem in this field. Contents of the invention [0005] The purpose of the present invention is to provide a driverless car and its working method. [0006] In order to solve the above technical problems, the invention provides a driverless car, comprising: [0007] A plurality of camera mirror groups arranged around the vehicle body, and a processor module electrically connected to each camera mirror group, and the processor module is also connected to the central ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More