

Robot avoidance control method and device
A control method and robot technology, applied in the field of data processing, can solve the problems of robot damage, increase of robot maintenance cost, inability to apply robot passive avoidance, etc., achieve the effect of optimizing avoidance technology and improving versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
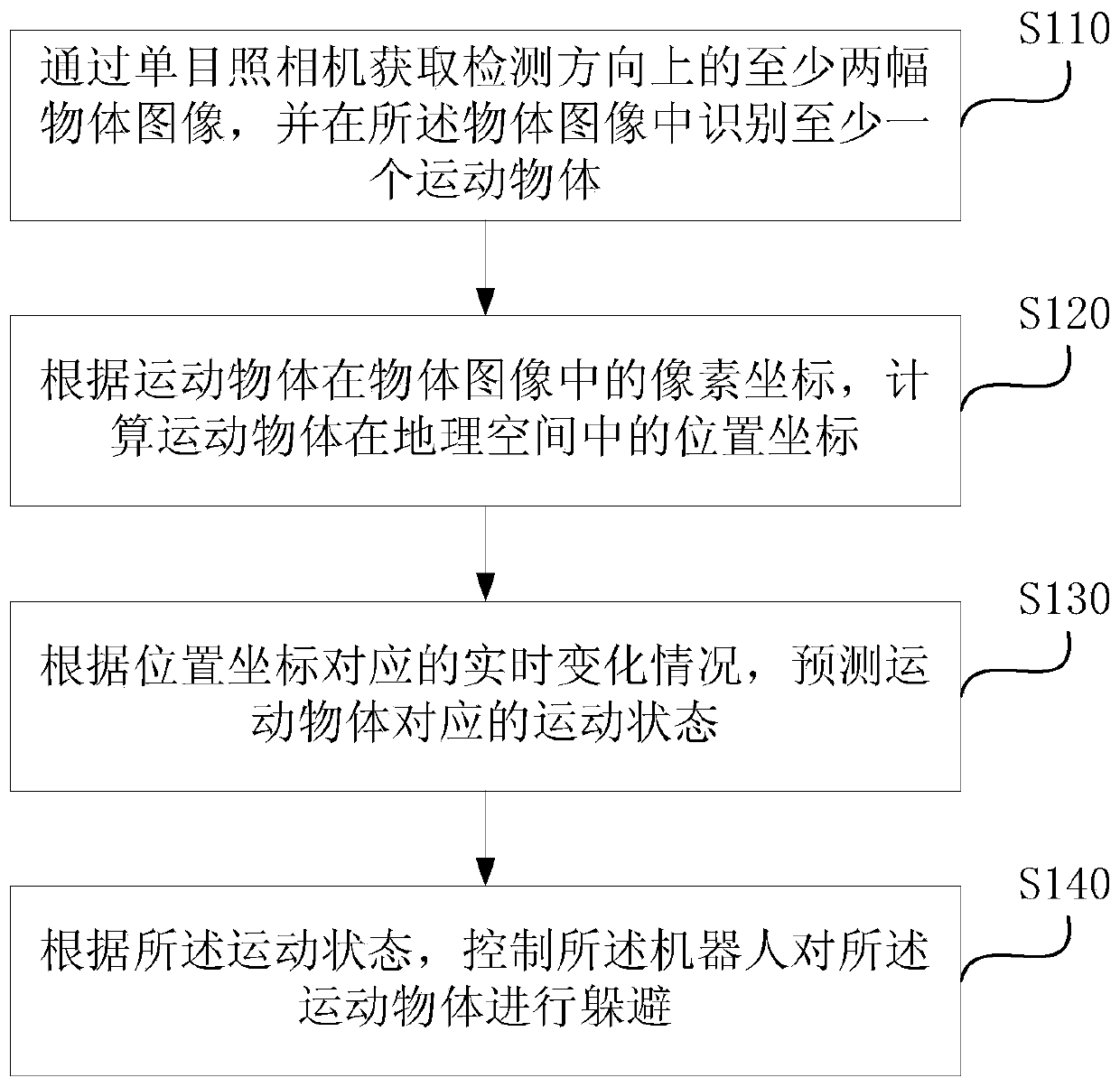
[0032] Figure 1a This is a flowchart of a robot avoidance control method provided in the first embodiment of the present invention. This embodiment is applicable to the situation where the robot avoids moving objects. The method can be executed by a robot avoidance control device, which can be software And / or hardware, and generally can be integrated into the controller of the robot. The method of this embodiment specifically includes the following steps:
[0033] S110. Obtain at least two object images in the detection direction by a monocular camera, and identify at least one moving object in the object images.
[0034] In this embodiment, the monocular camera (camera with only one lens) can be configured on the head or other rotatable parts of the robot, and is used to rotate the robot to a detection direction. Take multiple images of objects on the.
[0035] Wherein, the shooting distance of multiple object images can be preset according to actual conditions, for example, 2s, 3s...
Embodiment 2
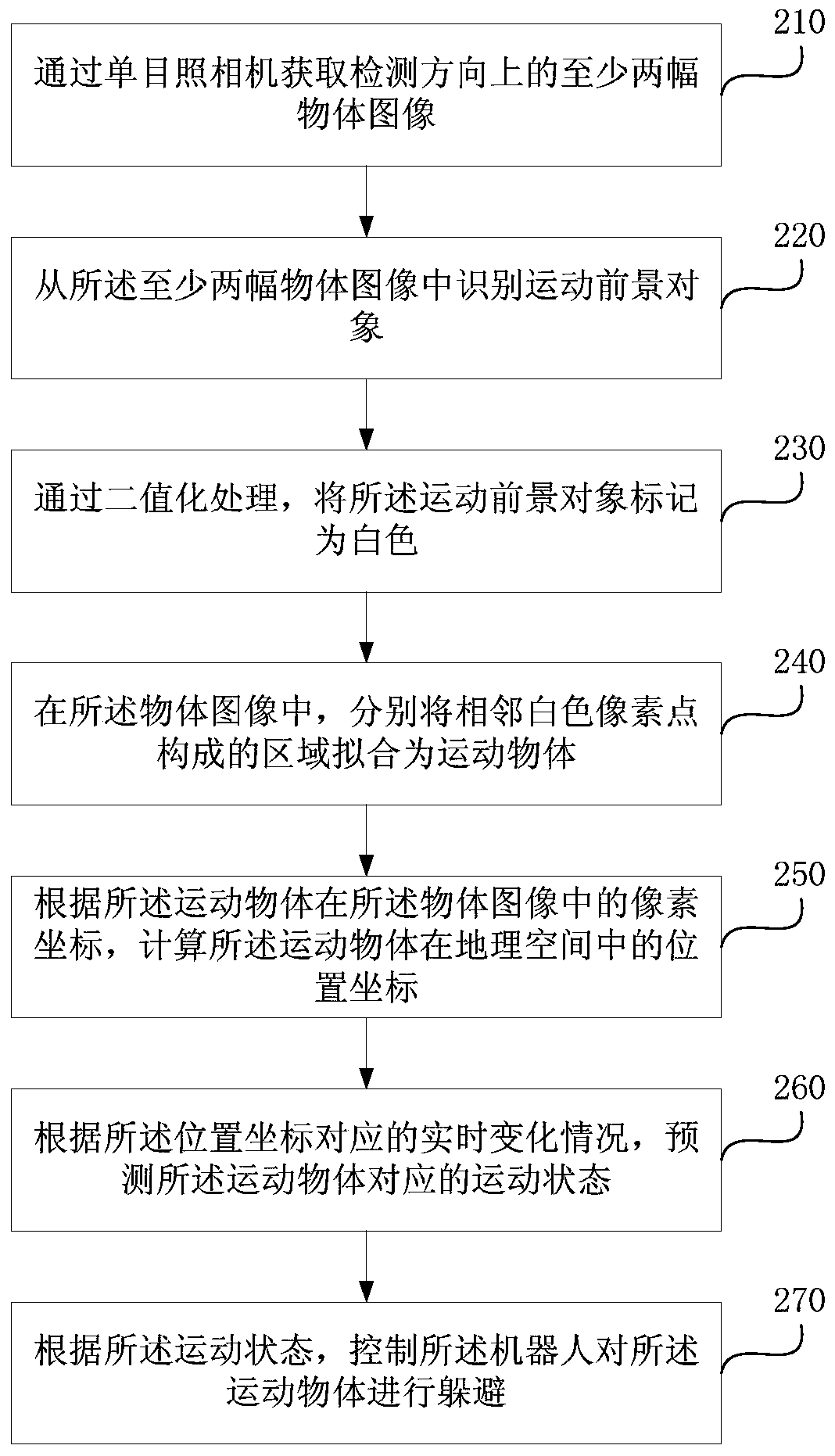
[0052] Figure 2a It is a flowchart of a robot avoidance control method provided in the second embodiment of the present invention. This embodiment is optimized based on the above-mentioned embodiment. In this embodiment, the identification of at least one moving object in the object image is specifically optimized The following steps are: identifying a moving foreground object from the at least two object images; marking the moving foreground object as white through binarization processing; in the object image, respectively simulating the regions formed by adjacent white pixels Combined as a moving object. Correspondingly, the method of this embodiment specifically includes:
[0053] S210. Obtain at least two object images in the detection direction by using a monocular camera.
[0054] S220: Recognizing a moving foreground object from the at least two object images.
[0055] As mentioned earlier, moving foreground objects can be identified from multiple object images by using mov...
Embodiment 3
[0074] Figure 3a It is a flowchart of a robot avoidance control method provided in the third embodiment of the present invention. This embodiment is optimized based on the above-mentioned embodiment. In this embodiment, the height of the moving object in the geographic space is set to 0. The position coordinates are associated with the pixel coordinates of the moving object closest to the ground plane in the object image, and the position coordinates of the moving object in the geographic space are calculated for further optimization. Correspondingly, the method of this embodiment specifically includes:
[0075] S310. Obtain at least two object images in the detection direction by a monocular camera, and identify at least one moving object in the object images.
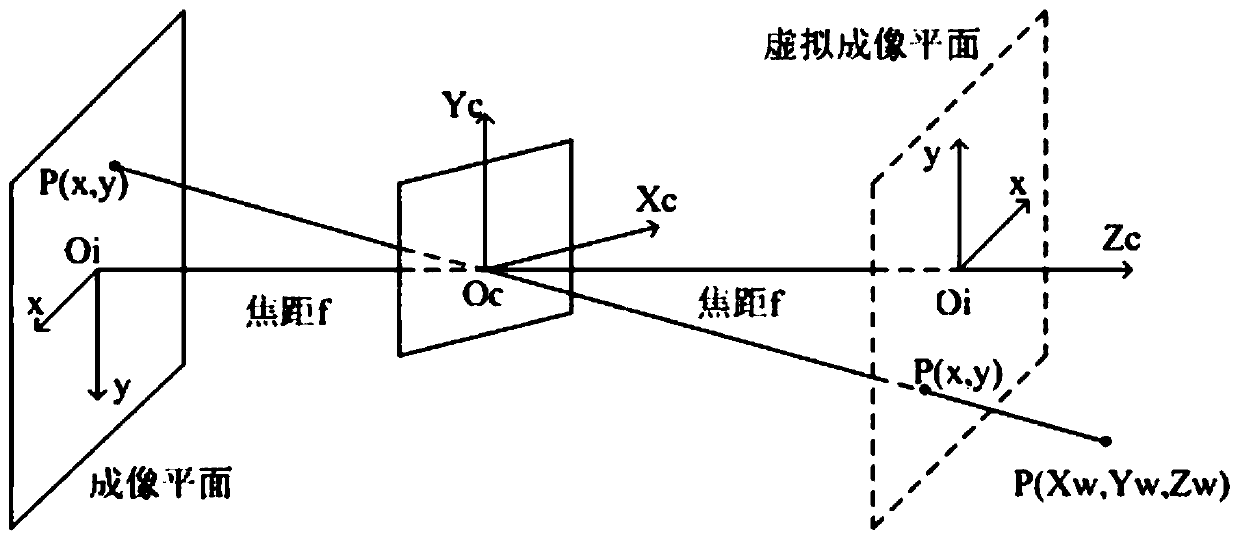
[0076] S320. Establish a three-dimensional measurement coordinate system according to the position of the monocular camera in the geographic space; wherein the projection point of the geometric midpoint of the monocular c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More