Wall-climbing robot for cleaning
A wall-climbing robot and cleaning technology, applied in the field of robots, can solve the problems of insufficient obstacle crossing ability and insufficient practicability of cleaning robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
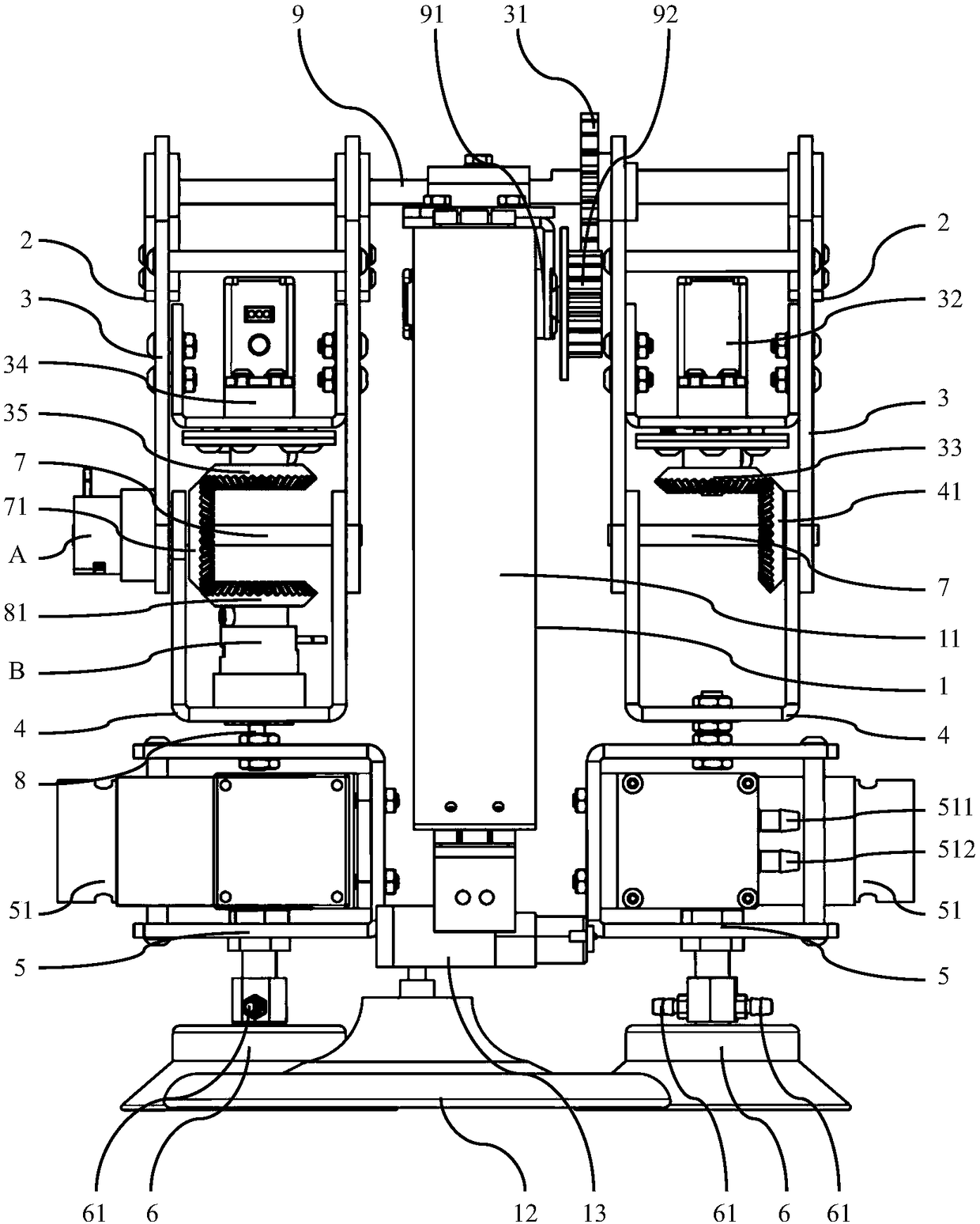
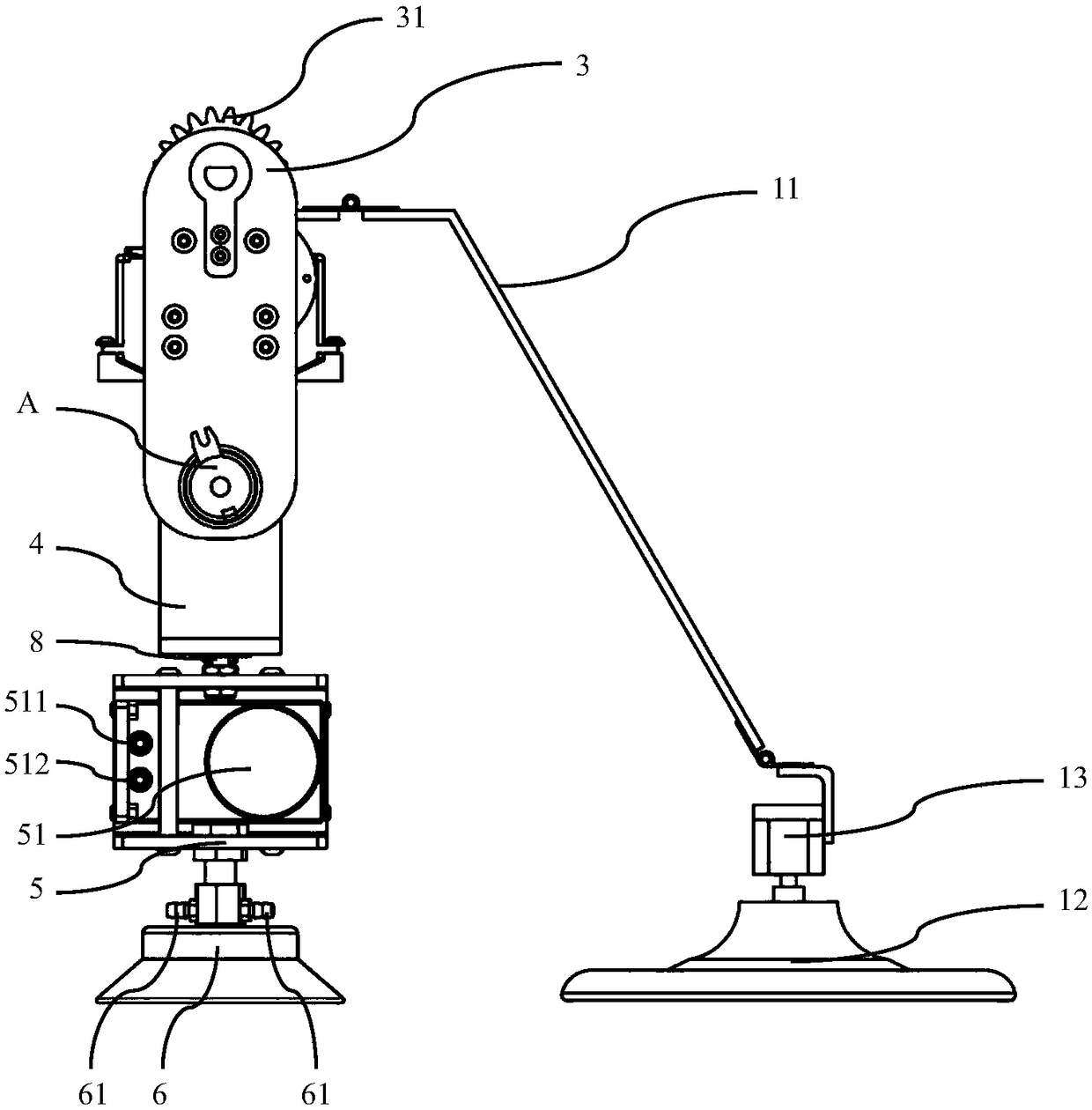
[0017] combine figure 1 and figure 2 As shown, the cleaning wall-climbing robot of the present invention is schematically shown, including a cleaning device 1 and two walking legs 2 arranged in parallel, and the walking legs 2 include walking thighs 3, walking shanks 4, adsorption devices 5 and Suction cup 6, one of the ends of the two walking thighs 3 is connected through the rotation of the waist shaft 9, the waist shaft 9 is perpendicular to the length direction of the walking thighs 3, the other end of the walking thighs 3 is connected to the walking calf 4 through the rotation of the leg lifting shaft 7, and the leg is lifted The rotating shaft 7 is also perpendicu...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap